
 French
French Deutsch
DeutschProgramme Viking — Wikipédia
Pour les articles homonymes, voir Viking (homonymie).
Sondes spatiales

| Organisation | |
|---|---|
| Constructeur | |
| Domaine | Etude de l'atmosphère, du sol et de la géologie de Mars |
| Type de mission | Orbiteur et atterrisseur |
| Lancement | Viking 1 : Viking 2 : 9 septembre 1975 |
| Lanceur | Titan III-E / Centaur |
| Fin de mission | Viking 1 : atterrisseur 30 novembre 1982 - orbiteur Viking 2 : atterrisseur 11 avril 1980 - orbiteur 25 juillet 1978 |
| Site | [1] |
| Masse au lancement | 3 527 kg dont orbiteur 2328 kg Atterrisseur : 992 kg (orbite martienne) 590 kg (surface de Mars) |
|---|---|
| Masse instruments | Orbiteur : 72 kg Atterrisseur : 91 kg |
| Ergols | Orbiteur : MMH / Peroxyde d'azote Atterrisseur : Hydrazine |
| Masse ergols | Orbiteur : 1445 kg Atterrisseur : 85 kg |
| Δv | Orbiteur : 1480 m/s Atterrisseur : 180 m/s |
| Contrôle d'attitude | Stabilisé sur 3 axes |
| Source d'énergie | Orbiteur : Panneaux solaires Atterrisseur : RTG |
| Puissance électrique | Orbiteur : 620 Watts Atterrisseur : 70 Watts |
| Périgée | Viking 1 : 300 à 1510 km Viking 2 : 300 à 1496 km |
|---|---|
| Apogée | Viking 1 : 32 600 km Viking 2 : 35 800 km |
| Période de révolution | Viking 1 : 21,9 à 24 heures Viking 2 : 24 à 27,32 heures |
| Inclinaison | Viking 1 : 37,9° Viking 2 : 55,2° |
| IRTM (orbiteur) | Radiomètre infrarouge |
|---|---|
| MAWD (orbiteur) | Spectromètre infrarouge |
| VIS (orbiteur) | Caméras |
| X (orbiteur) | Radio science |
| GCMS | Laboratoire chimique |
| GEX | Laboratoire de biologie |
| X | Station météorologique |
| X | Sismomètre passif |
| UAMS | Spectromètre de masse |
| XRFS | Spectromètre de fluorescence à rayons X |

Le programme Viking est un programme spatial de la NASA qui a posé les premiers engins américains sur le sol martien. Dans le cadre de ce programme, deux sondes spatiales identiques, Viking 1 et Viking 2, ont été lancées en 1975 par une fusée Titan / Centaur à un mois d'intervalle. Chacune de ces missions comprenait un engin destiné à se placer en orbite autour de la planète et un module qui devait se poser sur le sol et mener des investigations en restant fixe. Les objectifs scientifiques étaient de réaliser des images à haute résolution de la surface de la planète permettant d'identifier les principales structures géologiques présentes en surface, de déterminer la structure et la composition du sol et de l'atmosphère et d'identifier la présence éventuelle de la vie sur Mars.
Le programme Viking se substitue au programme Voyager Mars qui avait été planifié par la NASA dans le cadre du programme Apollo avant d'être abandonné. Au moment du lancement des sondes spatiales Viking, l'étude scientifique de Mars est peu avancée. Les orbiteurs et atterrisseurs composant le programme Viking fonctionnent durant 1 à 6 ans et permettent de dresser un premier portrait exhaustif de la planète : composition du sol et de l'atmosphère, climat, cartographie de l'ensemble de la surface. De nombreuses formations géologiques façonnées par l'action de l'eau sont découvertes. Par contre, malgré l'emport d'instruments d'analyse sophistiqués, les missions n'ont pas permis de déterminer si des formes de vie étaient présentes dans le sol martien. Le programme Viking reste à ce jour la plus ambitieuse et la plus coûteuse des missions envoyées vers Mars avec un budget de 3,8 milliards de dollars (actualisé à 2014).
Contexte
[modifier | modifier le code]
Mars à la veille de l'ère spatiale
[modifier | modifier le code]Depuis l'invention du télescope, Mars intrigue les scientifiques comme le grand public. Les premières observations télescopiques révélèrent des changements de couleur à sa surface, faisant penser à de la végétation qui évoluerait selon les saisons. De même, Giovanni Schiaparelli croit voir en 1877 des canaux suggérant l'existence d'une vie intelligente. À la fin des années 1950, peu avant que les premières sondes spatiales vers Mars ne soient lancées, les connaissances sur Mars découlent des observations effectuées avec les télescopes terrestres qui ne permettent pas de distinguer des détails inférieurs à 100 km. Les images fournies par ces instruments montrent une planète rougeâtre comportant des structures au sol de grande taille alternativement claires et sombres et deux calottes polaires dont la taille varie au cours de l'année. Les scientifiques considèrent généralement que ces dernières sont constituées de glace d'eau. Ils émettent l'hypothèse que la planète dispose d'une atmosphère car à certaines périodes de l'année, les détails de la surface s'estompent et on observe des nuages de couleur blanche ou jaune. Enfin, certains observateurs estiment qu'une végétation fruste (lichens) subsiste peut-être à la surface de la planète ce qui expliquerait les variations de teinte observées selon les saisons. Les estimations de pression atmosphérique sont largement au-dessus de la réalité et les températures avancées (de 10 à 25 °C à l'équateur dans une étude réalisée dans les années 1920) sont également fortement surévaluées[1].
Dès le début de l'ère spatiale Mars est l'un des enjeux de la course à l'espace, affrontement pacifique entre les États-Unis et l'Union soviétique à l'époque de la guerre froide. Les deux pays sont motivés par les spéculations sur la présence de vie sur Mars et le fait qu'il s'agit d'une destination relativement proche, ce qui permet d'y envoyer relativement facilement des engins spatiaux. Les soviétiques se lancent dans l'exploration spatiale de Mars dès octobre 1960, trois ans seulement après le lancement réussi du premier satellite artificiel Spoutnik 1. Mais durant quatre ans, ils ne cesseront d'essuyer des échecs. L'URSS parvient la première à poser sur le sol de la planète l'atterrisseur Mars 3 (1971), mais celui-ci ne survit que vingt secondes.
Mariner 4 révèle une planète morte
[modifier | modifier le code]L'agence spatiale américaine, la NASA, qui ne dispose pas à ses débuts de lanceurs suffisamment puissants, ne lance ses premières missions vers Mars que quatre ans plus tard avec le programme Mariner développé par le Jet Propulsion Laboratory. Ces premières tentatives américaines sont couronnées de succès avec les toutes premières images de la planète rouge envoyées en juillet 1965 par Mariner 4. Les 22 photos d'une qualité moyenne qui sont prises par cette sonde spatiale révèlent un paysage de type lunaire couvert de cratères d'impact qui d'après leur aspect remontent à une période comprise entre deux et quatre milliards d'années. En apparence la planète ne connaît et n'a connu aucun phénomène d'érosion qui trahisse la présence d'eau. La partie photographiée ne présente par ailleurs aucun relief, montagne ou vallée. Cette vision déprimante met fin aux spéculations d'une Mars planète jumelle de la Terre popularisée par des auteurs de fiction comme Edgar Rice Burroughs et H.G. Wells. La pression atmosphérique mesurée est tellement faible (4,1 à 7,0 millibars, soit 0,5 % de celle de la Terre) que les scientifiques émettent l'hypothèse que les calottes polaires ne sont pas couvertes de glace d'eau mais de dioxyde de carbone. La température de surface mesurée, −100 °C, est également beaucoup plus basse que prévu. Enfin, aucun champ magnétique n'est détecté alors que l'existence de celui-ci est une condition indispensable pour permettre à des êtres vivants de survivre en surface[note 1],[2].
Voyager Mars : un programme ambitieux avorté (1963-1968)
[modifier | modifier le code]Pour le Jet Propulsion Laboratory (JPL), concepteur du programme Mariner, celui-ci ne constituait qu'une étape intermédiaire avant la conception de sondes spatiales plus sophistiquées capables de se poser sur le sol de Mars et de Vénus. Selon les plans très ambitieux du JPL, les sondes spatiales de la génération suivante devaient emporter une charge utile scientifique de 230 kilogrammes (contre environ 20 kilogrammes pour les premières sondes spatiales Mariner) et combiner un module devant se poser sur le sol des planètes Mars et Venus et un module qui devait se placer en orbite pour servir de relais de télécommunications. Le lancement de la première de ces nouvelles sondes spatiales, baptisées Voyager, était prévue dès 1966. Alors que les sondes spatiales Mariner étaient développées en interne par le JPL, la direction de la NASA avait demandé à son établissement de confier la construction des sondes spatiales à des industriels. En une étude sur le sujet est confiée d'une part à la division des missiles et engins spatiaux de General Electric et d'autre part à la société Avco. Deux configurations sont envisagées pour les sondes spatiales à destination de Mars : un engin spatial de 2,7 à 3,15 tonnes placé en orbite par une fusée Saturn IB et un engin de 1,8 tonnes lancée par une fusée Titan III. Les deux industriels proposent un orbiteur équipé de panneaux solaires et un atterrisseur encapsulé dans une bouclier thermique de forme conique pour la phase de rentrée atmosphérique et alimenté en énergie par des générateurs thermoélectriques à radioisotope. Les deux industriels envisagent comme site d'atterrissage Syrtis Major qui avait attiré l'attention des astronomes du fait des changements de luminosité attribués par certains au cycle d'une végétation martienne jusqu'au survol de Mars par Mariner 4 en 1965[3].
La programme Mars Voyager subit coup sur coup deux revers en 1964/1965. Fin 1964 le lancement des missions est repoussé de 1969 à 1971. En , Mariner survole Mars et ses instruments démontrent que le densité de l'atmosphère martienne est beaucoup plus faible que prévu ce qui impose de revoir la conception de l'atterrisseur et d'avoir recours à un lanceur Saturn V pour le lancement de la mission. L'utilisation de cette fusée repousse le lancement de la mission en 1973. La sonde spatiale dans sa nouvelle configuration a une masse de 12 tonnes dont 6,5 tonnes d'ergols. Le cout de la mission atteint désormais un milliard de dollars. En , la responsabilité du projet est transférée du JPL au centre de vol spatial Marshall. Le Congrès américain qui doit faire face au coût de la guerre du Vietnam (2 milliards de dollars par mois) décide en 1967 de réduire le budget alloué à certains programmes de la NASA. Le programme Voyager Mars est annulé[3].
Historique du programme Viking
[modifier | modifier le code]Réactivation du projet martien (1969)
[modifier | modifier le code]À la suite de l'annulation du programme Voyager Mars, la NASA convoque en tous ses établissements impliqués dans ce projet pour en faire le bilan. La conclusion est que l'annulation du projet n'est pas due à l'absence d'intérêt pour une mission à destination de la surface de Mars mais à la croissance continue du coût du projet. Quelques mois plus tard, constatant que son programme d'exploration robotique de la Lune (programme Surveyor, etc.) est sur le déclin et qu'aucune mission d'exploration du système solaire n'est programmée au delà de 1969, l'agence spatiale américaine lance un appel à propositions qui permet de réactiver le projet de mission martienne. Le centre de la NASA de Langley, à Hampton en Virginie dans le cadre du programme Apollo avait la supervision des missions de reconnaissance de la surface de la Lune et était responsable de la dynamique du vaisseau de rentrée atmosphérique. A ce titre le centre avait mené une étude sur un engin spatial effectuant un atterrissage « dur » à la surface de Mars[4].
Le projet martien est réactivé en décembre 1968 avec comme objectif le lancement d'une première mission profitant de la fenêtre de lancement de 1971 particulièrement favorable. Le JPL est chargé de développer l'orbiteur Mariner lancé cette année là dont l'objectif est d'identifier les sites d'atterrissage favorables. L'établissement de Langley est quant à lui retenu, au titre de son expertise, pour développer le véhicule devant se poser à la surface de Mars. Il est responsable de la gestion globale du projet. Cette dernière mission est baptisée Viking. La masse de l'orbiteur et de l'atterrisseur excédant les capacités du lanceur Atlas/Centaur, la NASA sélectionne la fusée Titan III pour le lancement de la sonde spatiale[4].
Sélection du fournisseur de l'atterrisseur
[modifier | modifier le code]Contrairement au JPL qui avait pour habitude de confier à ses équipes la construction des engins spatiaux, le centre Langley sous-traitait le développement des engins spatiaux placés sous sa responsabilité. Aussi plusieurs sociétés sont consultées pour la réalisation de l'atterrisseur. Différentes architectures sont proposées par ces entreprises : train d'atterrissage comprenant trois ou quatre pieds, énergie fournie par des panneaux solaires ou des générateurs thermoélectriques à radioisotope (RTG). Le développement est confié en à l'établissement de Denver (Colorado) de la société Martin Marietta Aerospace qui propose un engin alimenté par des RTG et avec un train d'atterrissage à trois pieds (solution retenue pour les atterrisseurs lunaires du programme Surveyor) pour un montant de 280 millions de dollars[5],[6],[note 2] Le JPL est quant à lui responsable de l'orbiteur, du module de navigation jusqu'à Mars, de l'acquisition des données et de la gestion de la mission à compter de son départ vers la planète rouge. L'adaptation du lanceur sera confiée au centre de recherche Lewis de la NASA, à Cleveland dans l'Ohio.
Dépassements budgétaires
[modifier | modifier le code]Quand il est soumis au vote du Congrès américain en , le budget alloué au programme Viking est estimé à 364,1 millions de dollars mais très rapidement les couts s'envolent. En , il est estimé à 606 millions de dollars alors que le budget de la NASA se contracte à la suite du premier atterrissage réussi d'un équipage à la surface de la Lune (mission Apollo 11). Pour faire face à la diminution des moyens financiers disponibles, la NASA repousse la lancement de la mission Viking à 1975. Cette fenêtre de lancement moins favorable impose l'emport par la sonde spatiale d'une plus grande quantité d'ergols et donc le recours à une version du lanceur Titan III plus puissante. Ce report sera en définitive le bienvenu car il donnera le temps à l'agence spatiale de mettre au point l'atterrisseur[7]. Le coût total du projet Viking sera d'environ 915 millions de dollars américains (soit 3,8 milliards de dollars actualisé à 2014), le plus gros budget alloué à un programme d'exploration du système solaire jusqu'à la décennie 2020[8].
La mission Mariner 9 révèle une planète Mars bien plus intéressante (1972)
[modifier | modifier le code]En , la NASA annonce le lancement programmé en 1971 de deux sondes spatiales identiques, Mariner 8 et Mariner 9, qui, contrairement aux missions ayant jusque là uniquement survolé Mars, doivent se placer en orbite autour de la planète et permettre ainsi une étude détaillée de sa surface et de son atmosphère. Mariner 8 est perdu au lancement à la suite d'une défaillance du système de guidage de l'étage Centaur mais la mise en orbite de Mariner 9 se déroule de manière nominale le . La sonde spatiale s'insère en orbite autour de Mars le . La sonde spatiale américaine devient ainsi le premier engin à se placer en orbite autour d'une planète autre que la Terre. Deux sondes soviétiques, Mars 2 et Mars 3, se placent également en orbite plusieurs jours plus tard. Les trois sondes spatiales se trouvent toutefois confrontées à un phénomène non prévu : une tempête de poussière empêche toute observation de la surface de Mars. Les sondes soviétiques, à la programmation rigide, utilisent toute la pellicule photo disponible, à photographier une planète uniformément grise. Elles larguent également des petites capsules destinées à effectuer un atterrissage dur à une vitesse de 60 kilomètres à l'heure. Seule la capsule de Mars 3 arrive au sol intacte mais elle ne survit que 20 secondes à l'atterrissage et ne transmet aucune donnée exploitable[9]. Le fonctionnement de la sonde spatiale Mariner 9, contrairement à celui des sondes soviétiques, peut être modifié par le centre de contrôle et la collecte des données n'est déclenchée que lorsque l'atmosphère de Mars s'éclaircit avant de devenir complètement limpide en mars 1972[10].
La mission Mariner 9 qui s'achève fin octobre 1972, est un succès éclatant. L'ensemble de la surface de la planète est photographiée dont certaines régions avec une résolution spatiale de 100 mètres. Mais surtout, alors que les missions précédentes avaient donné l'image d'une planète stérile d'apparence lunaire, Mariner 9 révèle une planète Mars à la topographie complexe et en partie façonnée dans le passé par l'eau. Les photos prises par la sonde spatiale mettent en évidence des réseaux de vallées et des chenaux d'inondation qui démontrent que Mars a été par le passé suffisamment chaude pour que de l'eau à l'état liquide circule à sa surface. Ces formations relancent l'intérêt des scientifiques comme du grand public. La quête d'une vie résiduelle à la surface de Mars est désormais intégrée aux objectifs des missions martiennes de la NASA et se traduit par le développement d'un instrument complexe embarqué sur les sondes Viking destiné à détecter une activité biologique dans le sol. Mariner 9 photographie le volcan géant Olympus Mons, le dôme de Tharsis avec ses trois volcans boucliers, l'immense canyon de Valles Marineris (nommé en l'honneur de la sonde spatiale), les strates des calottes polaires et démontre l'intense érosion éolienne ainsi que des traces d'une activité tectonique. Ces photos révèlent l'étonnante dichotomie entre un hémisphère sud occupé par des hauts plateaux et un hémisphère nord couvert de plaines[10].
Définition de l'architecture de la mission
[modifier | modifier le code]Pour l'atterrissage à la surface de Mars, la NASA a choisi une architecture plus complexe que celle adoptée par les missions équivalentes de l'Union soviétique. La sonde spatiale commence par se mettre en orbite autour de Mars et réalise une étude de la surface pour permettre l'identification par les ingénieurs de la NASA d'une zone d'atterrissage favorable à l'aide des photos prises par l'orbiteur. L'atterrisseur est ensuite largué et effectue un atterrissage en douceur contrairement aux engins soviétiques qui prennent contact avec le sol à près de 60 kilomètres à l'heure. L'atterrisseur est conçu pour fonctionner au moins 90 jours (contre 3 jours pour les sondes soviétiques). L'orbiteur est dérivé de l'orbiteur Mariner 9 mais la quantité d'ergols est beaucoup plus importante car la masse à insérer en orbite martienne comprend l'atterrisseur. Par ailleurs les besoins en énergie augmentent ce qui nécessite l'allongement des panneaux solaires qui permettent de doubler la production électrique. Enfin le diamètre de l'antenne parabolique de l'orbiteur est également accru pour permettre le transfert d'un volume de données plus important. L'orbiteur emporte une caméra permettant de réaliser des images ayant une résolution spatiale de 35 mètres. Cette architecture complexifie de manière significative la conception de la sonde spatiale qui doit être placée en orbite par un nouveau lanceur Titan III E/Centaur. A la date du lancement, le cout du programme atteint 1 milliard de dollars (équivalent en 2007 à 3 milliards de dollars)[4].
Mise au point de la technique de rentrée atmosphérique et d'atterrissage sur le sol martien
[modifier | modifier le code]Grâce à un budget disponible particulièrement conséquent, un important travail de recherche appliquée est réalisé pour mettre au point les techniques nécessaires pour l'atterrissage en douceur à la surface de la planète Mars. Avec son atmosphère 100 fois moins dense que la Terre et une gravité relativement importante par rapport à la Lune, la descente vers le sol martien est un exercice particulièrement difficile car la phase de freinage active (parachute ou système propulsif), ne peut intervenir que lorsque la vitesse du vaisseau a été suffisamment réduite par les forces de friction ce qui ne se produit qu'à une altitude relativement basse et laisse peu de temps pour les opérations de préparation de l'atterrissage. Les techniques développées pour la mission Viking, en particulier la phase de freinage par friction dans la haute atmosphère et à l'aide du parachute seront réutilisées par toutes les missions de la NASA à destination du sol martien au cours des deux décennies suivantes.
Pour freiner de manière efficace le vaisseau qui pénètre à 4,7 km/s dans l'atmosphère martienne selon un angle de 17° par rapport à l'horizontale, la partie avant du véhicule de rentrée de 3,5 mètres de diamètre a la forme d'un cône faisant un angle de 70° qui est recouvert d'un revêtement ablatif (SLA-561) de 1,37 centimètre d'épaisseur. Un parachute de 16 mètres de diamètre est déployé à une altitude de 5,79 kilomètres alors que la vitesse est tombée à Mach 1,1. Dans la phase finale de la descente, des moteurs-fusées à poussée modulable réduisent la vitesse verticale à 2,4 m/s et la vitesse horizontale à 1 m/s. Les sites d'atterrissage sélectionnés pour les missions Viking sont situés 2,5 kilomètres au-dessous du niveau moyen martien (équivalent du niveau de la mer sur Terre) ce qui permet de disposer de plus de temps pour se préparer à l'atterrissage. Les sondes Viking se posent sur un train d'atterrissage doté d'un système d'amortissement qui fournit une garde au sol de 20 centimètres. Malgré une sélection soigneuse des sites d'atterrissage, les ingénieurs découvriront que Viking 1 s'est posé à quelques mètres d'un rocher de 1 mètre de haut (Big Joe) qui aurait pu renverser l'atterrisseur[11].
Développement des expériences de détection de la vie sur Mars
[modifier | modifier le code]La détection de la vie à la surface de Mars joue un rôle central dans le programme Viking. Presque 10 % du budget (soit 400 millions de dollar 2014) est consacré à la mise au point d'instruments dont le rôle est de détecter d'éventuelles formes de vie martienne dans le sol martien (Expériences biologiques GEX/LR/PR, chromatographe / spectromètre de masse GC-MS). Compte tenu des données collectées par les missions spatiales précédentes sur la composition de l'atmosphère de Mars et sa surface, la communauté scientifique ne compte pas découvrir de formes de vie évoluées mais la plupart des scientifiques n'excluent pas la présence d'organismes analogues aux bactéries terrestres dont on connait les capacités d'adaptation aux environnements les plus extrêmes (température, pression, aridité, ensoleillement)[note 3]. L'exobiologie, la discipline scientifique qui a pour objectif d'étudier l'origine, la distribution et l'évolution de la vie dans l'Univers, est une science toute récente que la NASA contribue à fonder en créant un département d'exobiologie en son sein en 1960. La détection de la vie est un sujet complexe : le concept de vie lui-même est difficile à définir et ses manifestations peuvent être facilement confondues avec des processus purement chimiques. Dès 1959, des chercheurs commencent à travailler sur des instruments pouvant détecter la vie extraterrestre. Treize différentes sont proposées à la NASA pour remplir ce rôle pour les missions Viking. Trois sont sélectionnées - Gas Exchange (GEX) de Vance Oyama, Labeled Release (LR) de Gilbert Levin, Pyrolytic Release (PR) de Norman Horowitz - tandis que l'expérience GC-MS est choisie pour confirmer les résultats obtenus. Avant même le lancement, la pertinence des instruments retenus fait l'objet de contestations chez les scientifiques. Les tests menés sur des échantillons terrestres aboutissent dans certains cas à des résultats divergents ou manifestement erronés[12].
Lancement des sondes Viking (1975)
[modifier | modifier le code]
La NASA doit tester le fonctionnement du nouveau lanceur Titan III E/Centaur que l'agence spatiale compte par ailleurs utiliser pour ses sondes spatiales à compter de l'entrée en service de la navette spatiale américaine[note 4]. Le vol inaugural de la nouvelle fusée, qui a lieu le et simule la trajectoire des missions Viking, emporte une maquette de la sonde spatiale ainsi qu'un petit satellite scientifique. Le premier étage fonctionne de manière nominale mais l'étage Centaur ne s'allume pas. La charge utile retombe dans l'Atlantique. Toutefois le lancement réussi de la sonde spatiale Helios I qui a lieu le et utilise le même lanceur permet de qualifier la fusée[4].
Finalement les deux sondes spatiales Viking s'envolent vers Mars : le pour Viking 1 et le de la même année pour Viking 2. Après un voyage d'un peu moins d'un an, Viking 1 se place en orbite le , elle est rejointe par Viking 2 le sur son orbite. Les atterrisseurs se posent sur le sol martien le pour Viking 1 et le pour Viking 2. Viking 1 fonctionnera pendant plus de six ans, jusqu'au . Viking 2 durera un peu moins longtemps, mais continuera tout de même de fonctionner pendant un peu moins de quatre ans, jusqu'au [4].
Objectifs
[modifier | modifier le code]Le projet Viking consiste en un lancement de deux vaisseaux spatiaux vers Mars en vue de mener des expérimentations scientifiques. Les expériences biologiques étaient conçues pour détecter de la vie dans le sol martien. Les expériences étaient conçues par trois équipes différentes.
Chaque vaisseau était composé d'un orbiteur et d'un atterrisseur. Après s'être mis en orbite autour de Mars et avoir renvoyé les images permettant de sélectionner le site d'atterrissage, l'atterrisseur se séparait de l'orbiteur. L'atterrisseur entrait dans l'atmosphère martienne et se posait sur le site sélectionné. À ce stade de la mission, les deux objectifs scientifiques du programme Viking à remplir étaient :
- pour l'orbiteur : cartographier le plus précisément possible la surface de Mars ;
- pour l'atterrisseur : détecter une éventuelle présence de vie au stade élémentaire.
Caractéristiques techniques de la sonde spatiale
[modifier | modifier le code]
La sonde spatiale Viking, a une masse au lancement de 3 527 kilogrammes et sa hauteur totale est d'environ 3,29 m. Elle est constituée de deux sous-ensembles : l'orbiteur et l'atterrisseur.
L'orbiteur reste en orbite autour de Mars et est largement dérivé de la sonde spatiale Mariner 9. L'orbiteur, qui embarque plusieurs instruments scientifiques, remplit quatre objectifs. Il transporte l'atterrisseur jusqu'à Mars et s'insère en orbite autour de celle-ci ce qui impose l'utilisation d'une grande quantité d'ergols. Une fois arrivé à destination ses instruments sont utilisés pour collecter des photos des sites d'atterrissage potentiels et sélectionner le site retenu. Il sert de relais de communication entre l'atterrisseur posé à la surface de Mars et la Terre afin que ce dernier puisse transmettre ses résultats scientifiques. Enfin après que l'atterrisseur ait été largué ses instruments sont utilisés pour photographier la surface de Mars et analyser l'atmosphère de la planète.
L'atterrisseur encapsulé dans les boucliers biologique et thermique qui est transporté par l'orbiteur jusqu'à l'orbite martienne et qui après son largage, se pose à la surface de Mars.
L'orbiteur
[modifier | modifier le code]Le cœur de l'orbiteur est constitué d'une structure (bus) de forme octogonale d'un diamètre de 2,5 m et d'une hauteur de 45,7 centimètres dans laquelle sont logés les équipements permettant à l'engin de fonctionner : système de télécommunications, régulation et transmission de l'énergie, système de contrôle d'attitude et de navigation, ordinateur, électronique des instruments scientifiques, etc. Cet octogone comprend quatre faces latérales longues de 1,4 mètre et quatre faces latérales courtes de 58 centimètres. Cette structure est divisées en seize compartiments : trois disposés sur chacune des quatre faces longues de la structure, et un sur chaque face courte. Ce bus octogonal est surmonté par le moteur-fusée principal et les deux réservoirs cylindriques contenant les ergols alimentant celui-ci. Une plateforme orientable avec deux degrés de liberté est fixée sous le bus et supporte les instruments scientifiques. Des panneaux solaires sont fixés en croix sur les côtés du bus tandis que l'antenne parabolique assurant les principales communications est fixée sur un côté du bus[13].
La masse totale au lancement de l'orbiteur au lancement est de 2 328 kg, dont 1 445 kilogrammes pour les ergols utilisés par la propulsion principale et pour l'azote utilisé par les moteurs du contrôle d'attitude. L'instrumentation représente une masse de 72 kilogrammes.

Production d'énergie
[modifier | modifier le code]L'énergie de l'orbiteur est fournie par des panneaux solaires disposés en croix qui sont déployés perpendiculairement à l'axe de l'orbiteur de chaque côté de celui-ci. L'envergure de l'engin spatial avec les panneaux solaires déployés atteint 9,75 m. Chacune des quatre ailes est constituées de deux panneaux solaires de 1,57 mètre de long pour 1,23 m de large placés bout à bout. Les panneaux solaires ont une superficie totale de 14,53 m2 comprenant 34 800 cellules photovoltaïques. Ils fournissent 620 watts lorsque l'orbiteur est en orbite autour de Mars. L'énergie était stockée dans deux batteries nickel-cadmium d'une capacité de 30 ampères-heures[13].
Propulsion
[modifier | modifier le code]La propulsion principale prend en charge les manœuvres de correction de trajectoire durant le transit entre la Terre et Mars, l'insertion sur l'orbite martienne et les modifications ultérieures de cette orbite. Elle est assurée par un moteur-fusée à ergols liquides qui brule un mélange d'ergols hypergoliques de méthylhydrazine et de peroxyde d'azote. Le moteur est monté sur cardan avec un débattement de 9 degrés permettant de modifier l'axe de la poussée. Le moteur était capable de fournir 1 323 Newtons de poussée, ce qui permettait de fournir un delta-v de 1 480 mètres par seconde[13].
Contrôle d'attitude
[modifier | modifier le code]L'orbiteur est stabilisé sur 3 axes c'est-à-dire qu'il maintient en permanence son orientation fixe dans l'espace. Les erreurs d'orientation sont corrigées à l'aide de douze petits propulseurs à gaz froid utilisant de l'azote sous pression. La détermination de l'orientation sur les trois axes et les informations de navigation sont déduites des données produites par un capteur solaire grossier, un capteur solaire fin, un viseur d'étoiles utilisant Alpha Carinae comme étoile de référence et une centrale inertielle comprenant six gyroscopes et trois accéléromètres[13].
Télécommunications
[modifier | modifier le code]Les communications sont prises en charge principalement par un émetteur radio d'une puissance de 20 watts fonctionnant en bande S (2,3 gigahertz en émission et 2,1 gigahertz en réception) utilisant deux tubes à ondes progressives. Un émetteur fonctionnant en bande X (8,1 gigahertz en émission et 8,4 gigahertz en réception) est utilisé pour des expériences scientifiques utilisant les ondes radio. Les échanges radio avec la Terre utilisent une antenne parabolique à grand gain orientable sur deux axes orientables d'un diamètre de 1,5 m qui est fixée sur l'un des côtés de la base de l'orbiteur. Une antenne omnidirectionnelle à faible gain est fixée au sommet d'un mat. L'orbiteur est également équipé d'un émetteur/récepteur radio fonctionnant en UHF (381 MHz) pour les liaisons avec l'atterrisseur[13].
Les échanges avec la Terre se font en bande S. Le débit en émission est compris entre 2 000 à 16 000 bits par seconde pour les données scientifiques envoyées vers la Terre tandis que les commandes envoyées par les contrôleurs au sol se fond à une vitesse de transmission comprise entre 8,3 à 33,3 bits par seconde. Deux enregistreurs à bande magnétique, d'une capacité de 1 280 mégabits chacun, sont utilisés pour stocker de manière temporaires les données produites par les instruments avant leur transmission vers la Terre. Les sept premières pistes étaient destinées au stockage des images, et la huitième piste aux données infrarouges. Chaque enregistreur pouvait conserver 640 mégabits de données[14].
Ordinateur de bord
[modifier | modifier le code]La gestion du module et le contrôle des expériences est confiée à deux ordinateurs redondants, chacun équipé d'une mémoire de 4 096 mots. Cette mémoire était utilisée pour le stockage des séquences de commandes et des données collectées. Toutes les opérations liées au pilotage de l'orbiteur telles que les manœuvres de corrections, allumages moteurs, pointages de l'antenne haut-gain et le lancement d'expériences scientifiques étaient gérés par ces ordinateurs[15],[16],[17].
Système de contrôle thermique
[modifier | modifier le code]Le système de contrôle thermique comprend des radiateurs et des persiennes mobiles installés sur dix compartiments qui sont utilisés pour disperser la chaleur[13].
L'atterrisseur
[modifier | modifier le code]
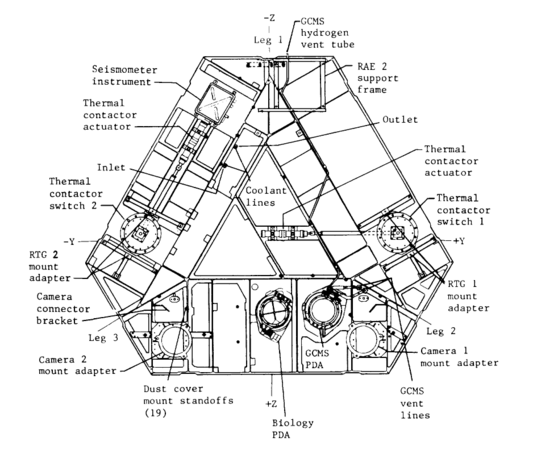
L'atterrisseur[18] construit par Martin Marietta consiste en une structure hexagonale réalisée en aluminium et en titane. Ces pans ont une longueur alternée de 1,09 et 0,56 m. Ils reposent sur les trois jambes du train d'atterrissage, attachées aux côtés les plus courts. Lorsqu'on les regarde du dessus, les jambes d'atterrissage forment les côtés d'un triangle équilatéral de 2,21 m de côté. Les capteurs des instruments sont fixés sur le pont supérieur de l'atterrisseur, et surplombent ainsi la surface du sol, une fois les jambes d'atterrissage déployées.
Bouclier biologique et thermique
[modifier | modifier le code]
L'atterrisseur est entouré par deux enveloppes concentriques au lancement qui sont larguées à différents moment du vol entre la Terre et la surface de Mars. A l'extérieur le bouclier biologique a pour objectif de limiter la contamination de l'engin par des micro-organismes terrestres qui pourraient se répandre sur Mars et fausser les mesures effectuées avec les instruments[19]. Ce bouclier biologique est fixé sur l'engin à l'issue de son assemblage et après que celui-ci ait séjourné durant 7 jours dans une salle portée à la température de 120 ° C afin de stériliser l'ensemble. La partie supérieure de cette enveloppe est larguée après que l'étage Centaur eut fait quitter l'orbite terrestre à la sonde Viking tandis que sa partie inférieure est larguée lors de la séparation de 'atterrisseur avec l'orbiteur. Ce processus de protection des planètes est mis au point dans le cadre des missions Viking et sera appliqué à toutes les nouvelles missions interplanétaires à destinations de corps célestes susceptibles d'abriter des formes de vie[20].
L'enveloppe interne est constituée par le bouclier thermique qui protège l'engin de l'échauffement provoqué par sa rentrée atmosphérique à très grande vitesse dans l'atmosphère martienne et joue un rôle central dans la réduction de la vitesse de l'atterrisseur. La partie inférieure du bouclier thermique qui subit le plus fort échauffement est recouverte d'un revêtement ablatif. Des petits moteurs (RCS) sont utilisés durant la phase de freinage pour maintenir l'orientation du vaisseau. La partie supérieure comprend en son centre un ensemble constitué d'un mortier et d'un parachute qui est utilisé pour freiner l'engin spatial durant la deuxième phase de la descente.
Ordinateur de bord
[modifier | modifier le code]
L’atterrisseur Viking utilisait un système de guidage, contrôle et de planification (en anglais : Control and Sequencing Computer, dit GCSC) constitué de deux calculateurs embarqués Honeywell HDC 402 de 24-bits équipés de mémoire à fil plaqué de 18 000 mots de capacité. Cet ordinateur commandait la totalité des éléments de l'atterrisseur avec des logiciels embarqués qui pouvaient être mis à jour par téléchargement depuis la Terre. La conception de l'ordinateur de bord fut l'un des principaux problèmes posés aux ingénieurs du programme. Il consistait en un système redondant (voir Tolérance aux pannes) double, équipé de mémoires. Le système était prévu pour qu'un ordinateur soit en réserve pendant que l'autre était actif. Parmi les programmes chargés dans l'ordinateur, figurait un logiciel capable de gérer entièrement la mission pendant les 22 premiers jours passés sur Mars, sans avoir à contacter la Terre. Ce logiciel était modifié et mis à jour dès que l'atterrisseur avait pris contact avec le centre de contrôle sur Terre[21].
Bien qu'il soit largement rapporté dans diverses publications en ligne que les ordinateurs de la sonde Viking étaient basés sur des systèmes de marque RCA Cosmac 1802, retenus notamment pour leurs capacités de résister aux rayonnements spatiaux, cette affirmation ne repose en réalité sur aucune source primaire[22].
Production d'énergie
[modifier | modifier le code]L'énergie électrique était fournie par deux générateurs thermoélectriques à radioisotope. Ces systèmes à base de plutonium-238 utilisent des matériaux radioactifs (comme le plutonium 238), qui génèrent de la chaleur en rayonnant dans des matériaux non radioactifs. La chaleur est alors convertie en électricité par des thermocouples en utilisant l'effet thermoélectrique. Ils étaient fixés sur les faces opposées de la base de l'atterrisseur, et protégés du vent par des écrans. Chaque générateur avait une taille de 28 cm, 58 cm de diamètre, et une masse de 13,6 kg. Il pouvait fournir 30 watts d'énergie en continu, sous une tension de 4,4 volts. Quatre piles électriques rechargeables au cadmium-nickel de 8 ampères/h sous une tension de 28 volts étaient également présentes afin de prévenir les baisses de puissance.

- Schémas du bus hexagonal de l'atterrisseur
-
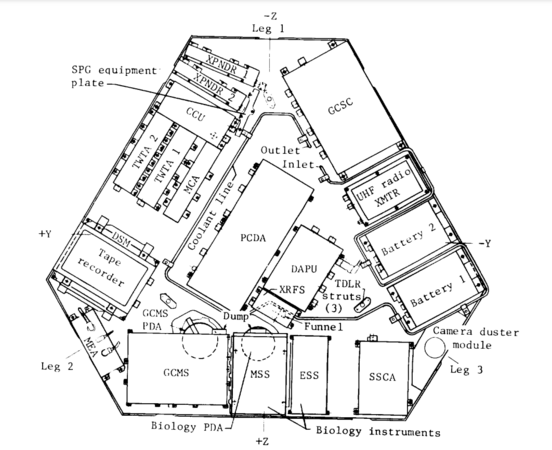
 Répartition des équipements installés sur le pont supérieur
Répartition des équipements installés sur le pont supérieur -
 Répartition des équipements installée dans la structure hexagonale.
Répartition des équipements installée dans la structure hexagonale.


- Vues de la maquette de l'atterrisseur du Smithsonian Air and Space Museum
-
 vue de face
vue de face -
 vue du dessus
vue du dessus
_-_panoramio.jpg)

Propulsion
[modifier | modifier le code]Pour amorcer sa descente vers le sol martien, l'atterrisseur utilisait un moteur-fusée fonctionnant avec un monergol à l'hydrazine (N2H4). Douze tuyères regroupées en trois grappes de quatre fournissaient une poussée de 32 newtons, produisant un delta-V de 180 m/s. Ces moteurs étaient également utilisés pour les manœuvres d'orientation. La phase finale de la descente et l'atterrissage étaient assurés par trois propulseurs utilisant de l'hydrazine. Ces trois propulseurs étaient fixés sur chaque section longue de la base du vaisseau, avec un pas de 120 degrés. Chaque propulseur était équipé de 18 tuyères pour disperser les gaz éjectés et réduire le souffle sur le sol martien. La poussée de ces propulseurs était modulable de 276 à 2 667 N.
L'hydrazine embarquée était préalablement purifiée pour éviter toute contamination de la surface martienne. L'atterrisseur emportait 85 kg de carburant, contenus dans deux réservoirs sphériques en titane, accrochés sur deux faces opposées de l'atterrisseur, au-dessous des écrans de protection contre le vent. La masse totale du vaisseau avec tous ces équipements était de 657 kg. Le contrôle de la navigation était assuré grâce à des centrales inertielles, quatre gyroscopes, un accéléromètre, un altimètre radar, un radar de descente et d'atterrissage, agissant sur la puissance des propulseurs de contrôle.
Télécommunications
[modifier | modifier le code]Les communications transitaient par un émetteur de 20 watts en Bande S et deux émetteurs à tube à ondes progressives de 20 watts. Une antenne parabolique grand gain, orientable sur deux axes, était montée sur un mât près de la base de l'atterrisseur. Une antenne omnidirectionnelle faible gain émettant en Bande S était également montée près de la base de l'atterrisseur. Cette antenne était utilisée pour les communications radio directes avec le centre de contrôle sur Terre. Une antenne UHF d'une puissance de 30 W et émettant sur 381 MHz était également installée pour jouer le rôle de relais half duplex avec l'orbiteur.
Stockage de données
[modifier | modifier le code]Les données pouvaient être stockées sur un enregistreur à bande de 40 Mégabits, dans une mémoire de 8 200 mots[note 5] ou expédiées instantanément par l'antenne en Bande S. La mémoire était utilisée en tampon d'entrée provisoire pour stocker les données expérimentales pendant de courtes périodes. Les données à conserver pour de longues périodes étaient transférées sur l'enregistreur à bande[23]. L'atterrisseur pouvait conserver ses données sur bande pour les transmettre dès qu'un module Viking orbiteur le survolait ou lorsque ses dispositifs de communication pouvaient entrer en communication directe avec la Terre.
Instruments scientifiques
[modifier | modifier le code]Instruments scientifiques de l'orbiteur
[modifier | modifier le code]
Les instruments scientifiques embarqués sur l'orbiteur comprenaient des appareils de prises de vue de Mars, de mesure de vapeur d'eau dans l'atmosphère et de cartographie en infra-rouge. Ces instruments sont installés sur un support situé à la base de l'orbiteur orientable avec deux degrés de liberté dont la température est régulée. Les instruments scientifiques pèsent environ 72 kg[24].
Caméras VIS
[modifier | modifier le code]_Diagram.png)
L'orbiteur est équipé de deux caméras VIS (en anglais : Visual Imaging System) dérivées de celles embarquées à bord des sondes spatiales Mariner. Il s'agit de caméras vidéo noir et blanc hautes performances de type vidicon, semblables à celles utilisées à l'époque dans les studios de télévision. Elles sont équipées d'un téléobjectif à lentilles. Le compartiment dans lequel les caméras étaient montées pouvait être orienté sur deux axes pour viser avec précision la zone à observer[25].
Le téléobjectif était à focale de 475 mm, avec un champ de vision de 1,54° × 1,69°. Depuis une altitude de 1 500 km, chaque prise de vue couvrait une surface minimum de 40 × 44 km. Six filtres pouvaient être activés, autorisant l'acquisition d'images couleurs (après assemblage de prises de vue filtrées avec les composants de couleur rouge, verte et bleue). Le délai entre deux photos était imposé par la vitesse de l'enregistreur à bande. Une image pouvait être acquise par chaque caméra alternativement toutes les 4,48 secondes. La résolution était de 1 056 lignes horizontales, divisées en 1 182 pixels chaque. La luminosité de chaque pixel pouvait être modulée sur 7 bits (127 niveaux de gris)[26].
Spectromètre infrarouge MAWD
[modifier | modifier le code]Le spectromètre infrarouge à grille MAWD (en anglais : Mars Atmospheric Water Detector) mesure le rayonnement infrarouge solaire réfléchi par la surface de la planète Mars et traversant l'atmosphère martienne. Le spectre lumineux dans la bande des 1,4 micromètre est analysé dans le but de déterminer la quantité de vapeur d'eau présente dans l'atmosphère. L'instrument permet de mesurer une quantité de vapeur d'eau comprise entre 1 et 1 000 micromètres avec une précision de 5 %. Le champ de vue instantané de l'instrument est de 2 × 17 milliradians. Un miroir rotatif à quinze positions permet d'effectuer des mesures sur une surface correspondant à 17 × 31 milliradians[27].
Radiomètre infrarouge IRTM
[modifier | modifier le code]Le radiomètre infrarouge IRTM (en anglais : Infrared Thermal Mapper) mesure la température de l'atmosphère et de certaines portions de la surface de Mars. Il comprend quatre petits télescopes qui comportent chacun sept détecteurs effectuant des mesures toutes les 1,12 secondes. L'instrument permet de mesurer des températures comprises entre −130 °C et +57 °C avec une précision de 1 °C. Le champ de vue de forme circulaire a un diamètre de 5 milliradians[28].
Radio science
[modifier | modifier le code]Les expériences de radio science sont réalisées à l'aide des émetteurs en bande S et X de l'orbiteur. La mesure du décalage Doppler des émissions radio et du temps de transmission permettent de déterminer la position et la vitesse de déplacement des orbiteurs. Ces données sont utilisées pour déterminer les caractéristiques du champ gravitationnel martien (celui-ci n'est pas uniforme), le plasma présent dans l'espace interplanétaire et la structure de la couronne solaire. L'analyse de la manière dont les émissions radio sont occultées lorsque l'orbiteur passe derrière Mars (vu de la Terre), fournit des informations sur les caractéristiques de l'atmosphère martienne (température, densité, pression) selon un profil vertical de l'atmosphère et de mesurer avec une très grande précision le diamètre de la planète. Une analyse de la réception par l'orbiteur des émissions radio de l'atterrisseur en VHF lorsque l'orbiteur est proche de l'horizon fournit des informations sur les caractéristiques physiques de la surface à proximité de l'atterrisseur. Enfin les échanges en bande S entre l'atterrisseur et la Terre sont utilisés pour déterminer la position de l'atterisseur et étudier l'orbite de Mars[29].
Instruments scientifiques de l'atterrisseur
[modifier | modifier le code]L'atterrisseur héberge les instruments permettant de remplir les principaux objectifs du programme Viking, à savoir l'étude scientifique de la planète Mars. Les instruments sont utilisés pour étudier la biologie, la composition chimique organique et inorganique du sol, la météorologie, la sismologie, le champ magnétique de la planète ainsi que l'apparence et les propriétés physiques de la surface et de son atmosphère de Mars. Les instruments scientifiques de l'orbiteur ont une masse totale d'environ 91 kg.
Chromatographe / Spectromètre de masse GC-MS
[modifier | modifier le code]
L'instrument GC-MS détermine la composition moléculaire et isotopique de l'atmosphère et surtout il est conçu pour tenter de détecter la matière organique présente dans le sol. Il est constitué d'un chromatographe en phase gazeuse et d'un spectrométre de masse. Pour analyser un échantillon de sol recueilli à l'aide de la pelle, celui-ci est dans une première étape chauffé dans un four jusqu'à 200°C[note 6]de manière à briser les molécules et produire un mélange gazeux. Ces gaz, transportés par de l'hydrogène, sont ensuite séparés les uns des autres par le chromatographe qui est un longue colonne de forme circulaire dans lesquels les composants les plus légers circulent le plus rapidement. Les gaz sortent du chromatographe dans l'ordre de leur masse[note 7]. Enfin le spectromètre de masse identifie les gaz produits. Pour ce faire les gaz sont ionisés puis accélérés dans un champ magnétique qui dévient leur trajectoire. Une plaque équipée de capteurs est placée sur le trajet des ions et permet de mesurer leur masse atomique. L'analyse de l'atmosphère est effectuée en sautant la première étape de ce processus. Le développement de cet instrument d'une masse totale de 20 kilogrammes alors qu'il occupe habituellement une pièce entière constitue en soi un exploit[30].
Expériences biologiques GEX/LR/PR
[modifier | modifier le code]
L'atterrisseur emporte trois expériences reposant sur des principes différents et destinées à détecter la présence d'organismes vivants martiens : Pyrolytic Release (PR), Gaz Exchange (GEX) et Labeled Release (LR)[31],[12]
- PR (en anglais : Pyrolytic Release) est conçu pour détecter l'assimilation de gaz carbonique par des organismes vivant. L'échantillon de sol est placé dans une chambre remplie de vapeur d'eau, de dioxyde de carbone et de monoxyde carbone. Le carbone utilisé est l'isotope radioactif de masse atomique 14. S'il est incorporé dans un composé organique, il peut être détecté à l'aide d'un compteur Geiger mesurant la radioactivité. La chambre est éclairée à l'aide d'une source simulant l'ensoleillement martien. Au bout de cinq jours, le sol est chauffé légèrement pour chasser le dioxyde de carbone qui aurait été éventuellement adsorbé puis la chambre est portée à une température très élevée (635°C) qui réalise le craquage des composés organiques qui ont été éventuellement formés par les organismes martiens. Les vapeurs résultant de cette pyrolyse sont analyser pour déterminer si des composés organiques contenant le carbone radioactif se sont effectivement formés.
- GEX (en anglais : Gaz Exchange) tente de détecter l'activité métaboliques d'organismes martiens en identifiant les multiples gaz doivent libérés après l'ingestion d'une matière organique nutritive. L'échantillon de sol martien est placé dans une chambre contenant une solution nutritive très riche et complexe[note 8]. L'expérience peut fonctionner selon trois modes : un mode humide où l'échantillon n'est pas mis en contact avec le liquide nutritif mais seulement humidifié ce qui peut susciter la germination d'éventuelles spores ou le réveil de cellules dormantes ; dans le deuxième mode, l'échantillon est mis au contact d'une petite quantité de solution nutritive et l'ensemble incube durant 200 jours. Dans le dernier mode (expérience témoin) le sol est analysé sans qu'il y ai eu d'apport d'eau ou de solution nutritive. Les gaz produits sont analysés périodiquement à l'aide de l'instrument GC-MS pour déterminer leur composition et identifier ainsi une éventuelle activité d'organismes vivants.
- LR (en anglais : Labeled Release) tente comme GEX de détecter l'activité métaboliques d'organismes martiens en identifiant les multiples gaz doivent libérés après l'ingestion d'une matière organique nutritive. Mais cette dernière est beaucoup moins complexe et les atomes carbone utilisés sont radioactifs pour permettre leur détection. Le liquide nutritif comprend cinq acides aminés et hydrates de carbone : de la glycine, de l'alanine et du lactate, du formiate (sel de l'acide formique) et enfin du glycolate. Ces composés très simples sont, selon certaines hypothèses, proches de ce qui existait sur la Terre primitive. Contrairement à GEX, l'expérience est très sensible et permet de détecter l'activité de 5 à 10 cellules bactériennes terrestres dans un gramme de sol. Le temps d'incubation est de 1 à 2 semaines.
Caméras
[modifier | modifier le code]
L'atterrisseur dispose de deux caméras à balayage fournissant des images à haute résolution (0,04°) ou à basse résolution en couleur et couvrant l'infrarouge (0,12°). Chaque photo couvre verticalement un angle de 20° en haute résolution et de 60° en basse résolution. Chaque caméra peut pivoter horizontalement sur 342,5° par incrément de 2,5°. La caméra peut pivoter verticalement par incrément de 10° et photographier la zone allant de 40° au-dessus de l'horizon à 60° au-dessous de l'horizon. Les caméras de forme cylindrique sont fixées sur le pont de l'engin spatial à 1,3 mètre au-dessus du sol et peuvent photographier deux des pieds de l'atterrisseur ainsi que la majeure partie du sol qui peut être atteint par la pelle utilisée pour prélever des échantillons. Les caméras sont séparées de 80 centimètres permettant d'obtenir des images stéréos. Les images en blanc et noir couvrent la bande spectrale allant de 0,4 à 1,1 micromètre. En utilisant un seul détecteur pour obtenir l'image, on peut obtenir une mesure radiométrique d'une précision de 10 %[32].
Spectromètre de fluorescence à rayons X XRFS
[modifier | modifier le code]Le spectromètre de fluorescence à rayons X XRFS (en anglais : X-Ray Fluorescence Spectrometer) est utilisé pour déterminer la composition atomique des échantillons de sol prélevés à la surface. La précision obtenue est de quelques pourcents pour les éléments les plus abondants et de quelques dizaines de parties par million pour les atomes présents à l'état de trace. Seuls les éléments chimiques d'une masse atomique supérieure à celle du magnésium sont détectés et les isotopes ne peuvent être distingués. Pour effectuer cette mesure une source radioactive constituée de l'isotope du fer de masse 55 et l'isotope du cadmium de masse 109 est utilisée pour bombarder l'échantillon. Les atomes d'abord excités retournent à leur état normal en émettant des rayons X dans différentes longueurs d'onde. En déterminant les longueurs d'onde des rayons émis, l'instrument permet de déterminer les atomes présents ainsi que leur abondance. Les ingénieurs sont parvenus à miniaturiser fortement cet instrument complexe dont la masse est inférieur à 2 kilogrammes[33].
Détection de particules magnétiques dans le sol
[modifier | modifier le code]La présence de particules magnétisées dans le sol de Mars est détectée à l'aide de trois paires d'aimants samarium/cobalt dont deux sont fixés sur la pelle utilisée pour prélever des échantillons du sol et un troisième est situé sur le pont supérieur de l'atterrisseur. Chaque aimant est composé d'un aimant circulaire de 2,5 centimètres de diamètre et d'un aimant de polarité opposée situé au centre. Les aimants sont situés dans le champ des caméras qui fournissent des images en blanc et noir et en couleurs. Un miroir agrandissant quatre fois l'image est utilisé pour accroitre la résolution spatiale[34].
Détermination des caractéristiques physiques de la surface et du sol
[modifier | modifier le code]Différents équipements et instruments sont utilisés pour déterminer la densité du sol, sa résistance, sa cohésion, les caractéristiques des particules composant le sol, les déplacements éoliens, la topographie, etc.[35]
Station météorologique
[modifier | modifier le code]Une centrale météorologique mesure la température, la pression atmosphérique ainsi que la direction et la vitesse du vent. Les capteurs sont fixés sur une perche déployable. La périodicité des mesures ainsi que la durée de celles-ci est paramétrable depuis le centre de contrôle pour chaque journée martienne. Les données collectées sont particulièrement importantes pour déterminer les fluctuations diurnes et saisonnières. La vitesse du vent est mesurée à de trois anémomètres à film chaud parcourues par un courant électrique qui réchauffent deux aiguilles en verre recouvertes de platine et d'oxyde d'aluminium. La puissance électrique nécessaire pour maintenir ces capteurs à une température fixe dans l'air ambiant permet de déterminer la vitesse du vent. La température atmosphérique est mesurée par trois thermocouples montés en parallèle. Un diaphragme de faible épaisseur fixé sur une boite scellée dans lequel le vide a été fait est utilisée pour mesurer la pression atmosphérique[36].
Sismomètre
[modifier | modifier le code]Les deux atterrisseurs emportent des sismomètres passifs dans le but de mesurer les activités sismiques sur Mars et de déterminer la structure interne de la planète. Le sismomètre comprend trois capteurs perpendiculaires composés d'un aimant fixe et d'une bobine mobile. Trois périodicités différentes de mesure peuvent être sélectionnées Le sismomètre, qui pèse 2,2 kg et consomme 3,5 watts, est peu sophistiqué avec une sensibilité de l'ordre du nanomètre dix fois inférieure à celle des instruments installés sur la Lune par les équipages du programme Apollo. Les géophysiciens concepteurs de l'expérience ont été contraints d'accepter que l'instrument soit installé sur le pont de l'atterrisseur au lieu d'être en contact direct avec le sol. Les données collectées doivent être fortement compressées et donc dégradées avant d'être transmises vers la Terre car le débit de la liaison avec la Terre est réduit[37],[38].
Radio science
[modifier | modifier le code]L'expérience de radio science utilise l'émetteur radio en bande S pour mesurer le décalage Doppler et le temps de transmission entre la surface de Mars et la Terre. Les données résultantes sont utilisées pour déterminer la position précise de l'atterrisseur à la surface de la Terre[39].
Expériences utilisées durant la descente pour déterminer les caractéristiques de l'atmosphère martienne
[modifier | modifier le code]
Trois expériences scientifiques sont mises en œuvre durant la descente vers le sol martien pour caractériser l'atmosphère de la planète.
- Détermination de la structure de l'atmosphère
Plusieurs équipements de l'atterrisseur (accéléromètres, altimètre radar, thermomètres, capteurs de pression) sont utilisés durant la descente vers le sol en dessous de l'altitude 132 kilomètres pour déterminer la température et de la pression tout au long du profil vertical de l'atmosphère martienne. À partir de ces données on déduit la densité de l'atmosphère et la masse atomique moyenne[40].
- Détermination des caractéristiques de l'ionosphère martienne
L'instrument RPA (Retarding Potential Analyzer ) mesure la composition, la structure et la température de l'ionosphère. L'instrument est monté sur la partie frontale du bouclier thermique. Il fonctionne de manière intermittente entre les altitudes de 16 000 et 5 000 kilomètres et de manière continue entre 500 et 100 kilomètres. L'instrument mesure les électrons énergétiques, les électrons thermiques et les ions thermiques[41].
- Mesure de la composition atomique de l'atmosphère
Le spectromètre de masse UAMS (Upper Atmosphere Mass Spectrometer) , qui est fixé face à une ouverture dans le bouclier thermique, utilise un double système de focalisation (électrostatique et magnétique) pour mesurer les concentrations d'atomes neutres dont la masse atomique est comprise entre 1 et 49. Sa périodicité d'échantillonnage est d'environ cinq secondes [42].
L'infrastructure au sol
[modifier | modifier le code]
Les missions Viking sont gérées par le Viking Mission Control Center (VMCC). Celui-ci comprend un centre de contrôle pour la centralisation des informations, des organisations assurant le support de mission (Mission Support Areas) et un système de simulation[43].
Le contrôle des missions Viking est pris en charge par le SFOF (Space Flight Operation Facility), une structure du Jet Propulsion Laboratory (JPL) située à Pasadena en Californie. Le SFOF était le lieu de gestion de la mission, et de suivi et réception des données transmises par Viking, et reçues par les antennes paraboliques du Deep Space Network (DSN) également géré par le JPL. Le SFOF, construit en 1963, est toujours actif aujourd'hui pour les missions du JPL. C'est un immeuble de trois étages, équipé de sa propre centrale électrique. Dès 1963, l'immeuble était équipé d'un système d'air conditionné sophistiqué pour permettre le bon fonctionnement des systèmes électroniques et informatiques de l'époque, très sensibles aux conditions de l'air ambiant[44].

Déroulement des missions
[modifier | modifier le code]
Principales phases des missions Viking
[modifier | modifier le code]Les missions interplanétaires étaient à l'époque du programme Viking à leurs prémices. On avait certes posé des hommes sur la Lune, avec leurs équipements, mais de nombreuses missions automatisées avaient échoué. L'atterrisseur représentait l'élément principal de la mission. C'était autour de lui et de son fonctionnement qu'était architecturée toute la mission. Chaque étape de la mission pendant le voyage jouait un rôle dans l'arrivée à destination puis le fonctionnement du module parvenu à la surface. On peut schématiquement décomposer une mission Viking comme suit :
- la préparation du vaisseau, et notamment sa stérilisation, puis son installation au sommet du lanceur sur le pas de tir ;
- le transit entre la Terre et Mars avec les corrections de trajectoire ;
- la mise en orbite autour de Mars ;
- la sélection à l'aide des instruments de l'orbiteur d'un site d'atterrissage dépourvus d'obstacles trop importants (rochers de grande taille, accidents de terrain, pente) ;
- la modification de l'orbite de manière à larguer l'atterrisseur dans les conditions optimales ;
- le largage de l'atterrisseur ;
- la mise en route des expériences scientifiques et la transmission des données recueillies.
La sonde Viking avait été conçue pour réaliser une part importante de ces étapes de manière automatisée pour de nombreuses raisons : la première étant que les communications avec la Terre étaient difficiles sur la distance considérée. Il n'existait qu'une fenêtre de communication de 20 minutes half-duplex entre la Terre et Mars après la séparation de l'orbiteur et de l'atterrisseur et jusqu'à l'atterrissage. Toute la navigation depuis l'obtention d'une référence inertielle jusqu'à la localisation d'un point de référence sur la zone d'atterrissage devait donc être gérée par l'ordinateur de bord.
Une fois sur place, l'atterrisseur ne pouvait communiquer avec la Terre que durant la moitié de chaque jour martien. La puissance électrique disponible restreignait encore la durée des liaisons qui ne pouvaient finalement avoir lieu que pendant un très court laps de temps chaque jour. Il était possible au centre de contrôle de donner des instructions et reprogrammer le vaisseau sur Mars, mais finalement la majorité du contrôle des opérations fut réalisée de manière autonome, au jour le jour[45].
Sur les missions plus récentes, la phase de repérage réalisée par le module Viking en orbite n'est plus nécessaire. Ainsi, le programme Pathfinder n'en a pas eu besoin. Les modules d'atterrissage sont immédiatement mis sur une orbite leur permettant d'atterrir.

La mission Viking 1
[modifier | modifier le code].jpg)

Viking 1 (Viking B avant son lancement) décolle à bord de la fusée Titan III-E / Centaur depuis la base de lancement de Cape Canaveral (Floride) le . La sonde spatiale s'insère en orbite autour de Mars le et est placée son orbite définitive le : la sonde spatiale circule sur une orbite haute très elliptique de 1 513 x 33 000 kilomètres qu'elle parcourt en 24,66 heures. Viking 1 réalise des photos des zones d'atterrissage potentielles pour permettre la sélection du site le plus favorable. Le site qui avait la préférence des scientifiques était Ares Vallis car ce chenal d'inondation de Mars avait du par le passé être recouvert d'eau et avoir potentiellement abrité la vie. Mais les images prises par l'orbiteur montrent que le site, parsemé de petits cratères et de rochers de toute taille, est trop accidenté pour une tentative d'atterrissage. Le deuxième site préselectionné est tout aussi accidenté et finalement c'est un troisième site situé dans la région de Chryse Planitia qui est retenu. Il était prévu que la sonde spatiale se pose de manière symbolique le , jour de l'indépendance américaine, mais avec le retard pris dans la recherche d'un site acceptable, l'atterrisseur ne se détache de l'orbiteur que le . Toutefois par une heureuse coïncidence il s'agit de la date anniversaire des premiers pas de l'homme sur la Lune (Apollo 11). L'atterrisseur qui orbite à une vitesse de 4 km/s autour de Mars effectue la manœuvre de désorbitation à une altitude de 300 kilomètres. Parvenu à une altitude de 6 kilomètres et alors que sa vitesse de descente est encore de 250 m/s, le parachute est déployé. Parvenu à 1,5 km d'altitude (vitesse de 60 m/s) les moteurs-fusées sont mis à feu pour ralentir la sonde spatiale. Celle-ci atterrit avec une vitesse verticale résiduelle de 2,5 m/s à 11 h 53 min 6 s UTC (16 h 13 en heure martienne), soit 3 heures après s'être séparé de l'orbiteur, dans la partie ouest de Chryse Planitia dans l'hémisphère nord. Viking devient le premier vaisseau à effectuer un atterrisseur en douceur à la surface de Mars et à transmettre une photo depuis celle-ci (la sonde soviétique Mars 3 qui a effectué un atterrissage à grande vitesse auparavant a cessé de fonctionné quelques secondes après son arrivée et n'a transmis aucune photo). Cette photo, prise 25 secondes après l'atterrissage, met 19 minutes pour parvenir jusqu'à la Terre qui est distante à ce moment-là de 342 millions de kilomètres[46].
La deuxième photo transmise est un panoramique qui montre un paysage constellé de roches entourées d'une couche de poussière très fine qui forme parfois des dunes. A moins de 8 mètres de l'atterrisseur, un gros rocher haut de 1 mètre démontre que la sonde spatiale, dont la garde au sol n'est que de 22 centimètres, n'est pas passée loin de la catastrophe. Les premières photos en couleur arrivent le lendemain de l'atterrissage. Les couleurs sont manifestement déformées car le drapeau américain peint sur le pont supérieur de l'engin spatial et qui se trouve dans le champ de vue de la caméra est violet et jaune. Les couleurs doivent être retouchées et les scientifiques comme le public découvrent pour la première fois les teintes qui caractérisent Mars : le ciel de couleur caramel et le sol rouge brun. Au cours des jours suivants, les ingénieurs tentent de mettre en service le bras équipé de la pelle utilisée pour prélever les échantillons de sol mais découvrent qu'une goupille de sécurité est restée coincée. Il faudra cinq jours pour libérer le bras. Le 28 juillet un premier échantillon de sol est prélevé et vient alimenter le spectromètre à fluorescence XFRS, le spectromètre de masse et les instruments de détection de vie[46].
La mission primaire de l'orbiteur, qui s'achève au début d'une conjonction solaire le 5 novembre 1976, est prolongée. Le , l'orbite de Viking 1 est modifiée pour permettre un survol de Phobos, la plus grande des deux lunes martiennes qu'elle survole à une distance de 90 km. Le périgée est abaissé à 300 kilomètres le 11 mars 1977. Il est remonté à 357 kilomètres le 20 juillet 1979. Le 7 aout 1980, les réserves d'azote, utilisées pour contrôler l'orientation, sont pratiquement épuisées ce qui met fin à la mission. L'orbite est relevée, passant à 320 x 56000 kilomètres, pour éviter que l'engin ne s'écrase sur Mars avant 2019 et empêcher ainsi une contamination de la surface de Mars par des micro-organismes terrestres. La sonde spatiale est mise en sommeil le 17 aout 1980 après avoir bouclée 1485 orbites[13],[47],.
La mission Viking 2
[modifier | modifier le code]La sonde spatiale Viking 2 (Viking A avant son lancement) est lancée le in extremis avant la fermeture de la fenêtre de lancement malgré des conditions météorologiques très défavorables[note 9]. L'équipement qui doit charger les batteries de l'atterrisseur tombe en panne le 21 octobre mais heureusement l'équipement de secours peut prendre le relais. La sonde spatiale atteint Mars le après une navigation de 333 jours. La sonde spatiale réduit sa vitesse de 1100 m/s à l'aide de sa propulsion pour s’insérer sur une orbite de 1 500 x 33 000 km qu'elle parcourt en 24,6 heures. Son inclinaison orbitale de 55,2° (contre 38° pour Viking 1) lui permet de survoler les régions polaires. Au cours du mois suivant, l'orbiteur prend des photos qui sont utilisées pour sélectionner un site d'atterrissage au relief peu accidenté. Le premier site étudié, Alba Patera, se révèle trop accidenté et n'est pas sélectionné tout comme le site de rechange de Arcadia Planitia. Bien que situé à une latitude trop nordique pour être étudié par le radar de l'orbiteur chargé de détecter les accidents de terrain, le site du cratère Mie situé dans une grande plaine relativement plate et qui semble recouvert de dunes est retenu. Le , après avoir abaissé son périgée à 3000 kilomètres, l'orbiteur largue l'atterrisseur. Mais 26 secondes après la séparation le système de contrôle d'attitude de l'orbiteur ne parvient plus à maintenir l'orientation et la liaison à haut débit avec la Terre qui passe par l'antenne parabolique, désormais dépointée, est interrompue. Heureusement les échanges se poursuivent à faible débit via l'antenne faible gain omnidirectionnelle ce qui permet de recevoir des informations confirmant le bon déroulement de la descente vers le sol et l'orientation de l'orbiteur est rétablie 9 heures plus tard. Le parachute est déployé à une altitude de 6 kilomètres alors que la vitesse de descente a été ramenée à 250 m/s. À une altitude 1,5 kilomètre, après largage du parachute, les moteurs-fusées sont mis à feu et réduisent cette vitesse à 2,4 m/s à l'atterrissage. L'engin vient se poser 200 kilomètres à l'ouest du cratère Mie dans la plaine de Utopia Planitia située dans l'hémisphère nord à une latitude de 47,67° deg et une longitude de 134,28° Est. À la suite d'une défaillance du radar ou d'une surface particulièrement réfléchissante, les propulseurs fonctionnent au moment de l'atterrissage 0,4 seconde plus longtemps que prévu ce qui crée des fissures dans le sol et soulève un nuage de poussière. Un des pieds reposant sur deux petits rochers, l'atterrisseur se retrouve incliné de 8,2°. Au grand soulagement du contrôle au sol, les télémesures transmises par l'engin démontrent qu'il est en bonne santé. La NASA vient de rééditer l'exploit de Viking 1. La caméra commence à prendre des photos immédiatement après l'atterrissage[48],[49],[50].

Le site d'atterrissage de Viking 2 se révèle très différent de celui de Viking 1. Le sol semble constitué d'une croute relativement solide avec beaucoup moins de poussières. il est parsemé de rochers plus gros et plus nombreux dont la surface est souvent parsemée de bulles à la manière des pierres ponces. À la grande déception des scientifiques, aucune dune n'est visible. La région environnante est complètement plate et aucun relief ne peut être distingué sur les photos prises par les caméras. Les instruments de Viking 1 chargés de détecter la vie ayant donné des résultats décevants, les scientifiques décident de modifier leur stratégie pour Viking 2. Ils décident de prélever des échantillons de sol situés sous des rochers et donc protégés du rayonnement ultraviolet du Soleil dont l'action stérilise le sol. Après plusieurs tentatives, la pelle parvient à déplacer un rocher de 3 kilogrammes. Mais l'analyse de l'échantillon prélevé ne donne aucun résultat concluant. L'atterrisseur fonctionnera durant 1 281 jours d'affilée et sera mis hors service le 11 avril 1980 à la suite d'une défaillance de ses batteries[46],[51].

De son côté l'orbiteur mène une campagne d'observation des hautes latitudes grâce au relèvement de l'inclinaison orbitale qui est modifiée le 30 septembre 1976 pour atteindre 75°. Une conjonction solaire interrompt les communications jusqu'à mi-décembre Le 20 décembre l'inclinaison orbitale passe à 80° et le périgée est abaissée à 778 kilomètres. En octobre 1977 l'orbiteur de Viking 2 passe à seulement 22 kilomètres Déimos, la plus petite des deux lunes martiennes, et prend des images particulièrement spectaculaires de ce satellite. Durant son séjour en orbite l'orbiteur réalise plus de 16 000 images de Mars et ses satellites. Une fuite de l'azote utilisé pour contrôler l'orientation de l'orbiteur entraine la fin de la mission de l'orbiteur le 25 juillet 1978 qui aura parcouru 706 orbites[49],[46].
Résultats scientifiques
[modifier | modifier le code]
Succédant à la mission Mariner 9 qui a mis en évidence que Mars était une planète plus complexe que ce que suggérait les premiers survols par des engins spatiaux, les missions Viking ont fourni des informations fondamentales sur Mars. Les instruments ont permis de détecter la présence d'azote dans l'atmosphère de Mars, une brique essentielle pour l'apparition de la vie. Ils ont effectué les premières mesures des isotopes du carbone, de l'oxygène, de l'azote et des gaz nobles dans cette atmosphère. Le ratio des isotopes de l'azote 15N/14N suggère que Mars a perdu 99 % de la masse de son atmosphère d'origine. qui était beaucoup plus dense permettant d'expliquer la présence d'eau liquide à la surface suggérée par les chenaux découverts sur les photos de la surface prises par Mariner 9. Toutes ces découvertes coïncident avec un moment de l'histoire de l'humanité où celle-ci prend conscience que la Terre est une planète. Les résultats des missions Viking donnent le coup d'envoi à la planétologie comparée dont l'objectif est de comprendre l’évolution de l’habitabilité des planètes en essayant de décoder leurs différences et/ou leurs points communs fondamentaux. Si les expériences visant à détecter la présence de vie à la surface de Mars, au cœur de la mission, ne donnent aucune réponse décisive (trois expériences ont fourni des résultats négatifs et une des résultats pouvant être interprétée comme positive), elles permettent toutefois de mettre en évidence une chimie du sol inattendue[52].
Premières images prises à la surface de Mars
[modifier | modifier le code]Parmi les résultats les plus spectaculaires des missions Viking figurent les premières images prises à la surface de Mars. Les sites d'atterrissage avaient été choisis pour réduire au maximum les risques et offraient des vues peu spectaculaires constituées d'étendues de sable faiblement ondulées et parsemées de rochers. Mais ces images panoramiques de bonne qualité permettaient pour la première fois d'imaginer ce que des hommes se posant à la surface de Mars pourraient ressentir et constituaient les premières images à l'échelle humaine d'une autre planète[53].
Détection de vie présente ou passée
[modifier | modifier le code]Les instruments utilisés pour détecter la présence de vie dans des prélèvements de sol martien fournirent des résultats ambigus. Dans un premier temps, les résultats de Viking 1 furent estimés positifs par les chercheurs américains de Pasadena, car les expériences d'incubation en présence de vapeur d'eau ou de milieu nutritif montrèrent un dégagement d'oxygène et de dioxyde de carbone, dégagements qui étaient les conditions fixées pour affirmer que la vie avait bien été détectée. Mais ces dégagement à un taux élevé et inattendu décrurent rapidement et cessèrent au bout de 40 heures pour le dioxyde de carbone, phénomènes non observés sur Terre avec des organismes vivants[54]. Ces dégagements sont difficilement explicables, et trop abondants et trop rapides pour être d'origine biologique[55] Une troisième expérience mit en présence un échantillon de sol dans du gaz carbonique radioactif sous une lampe simulant le Soleil ; du gaz carbonique fut absorbé, comme l'aurait fait une assimilation chlorophyllienne[56]. Enfin, l'analyse chimique d'un échantillon du sol par un spectromètre de masse ne décela aucun composé organique et montra du fer, du calcium, de l'aluminium, du silicium et du titane, tandis que le vanadium et le molybdène étaient absents[57]. La plupart des scientifiques furent convaincus que les résultats observés étaient le fruit de réactions chimiques de nature non biologique, créées par les conditions particulières d'oxydation du sol sur Mars[58].
Atmosphère de Mars
[modifier | modifier le code]Les instruments de l'atterrisseur activés durant la rentrée atmosphérique ont permis d'effectuer les premières mesures in situ de l'atmosphère martienne. Le spectromètre de masse a en particulier fait l'inventaire des éléments présents ainsi que des isotopes. L'instrument a découvert la présence de molécules d'azote (N2 : 2,7 %) et déterminé le taux réel d'argon (40Ar) beaucoup moins important que celui rapporté par la mission soviétique Mars 6. L'instrument a également effectué les premières mesures des isotopes de l'azote (14N et 16N). Arrivé au sol, l'instrument GCMS a mesuré de nouveau les taux d'azote et d'argon et obtenu des résultats cohérents avec ceux mesurés durant la rentrée atmosphérique. Le GCMS a mesuré la proportion des isotopes du carbone (12C et 13C) , de l'oxygène (16O et 18O), de l'azote (14N et 15N), de l'argon (36Ar et 39Ar), du néon, du krypton, et du xénon (129Xe et 132Xe) ainsi que des molécules de dioxyde de carbone (CO2), de monoxyde de carbone (CO) et d'oxygène (O2)[59].
Des nuages ont été observés par Viking 2, tourbillonnant sous l'effet de vents à plus de 200 km/h. Des phénomènes de brume matinales vite dissipées par le lever du Soleil ont aussi été observés[55].
Cartographie de la surface de Mars
[modifier | modifier le code]Les caméras VIS des orbiteurs ont pris 52 000 photos de la surface de Mars avec une résolution spatiale comprise entre 100 et 150 mètres soit un nombre dix fois supérieur à celui des photos prises par les caméras de Mariner 9. Certaines des zones ont même été photographiées avec une résolution de 8 mètres. Ces photos ont été utilisées pour définir les caractéristiques des sites d'atterrissage retenus pour les atterrisseurs. Elles ont été utilisées pour réaliser le premier atlas photagraphique couvrant l'ensemble de la planète. Elles ont également permis de mesurer les caractéristiques topographiques, photométriques et colorimétriques de la surface de Mars et d'étudier de manière détaillée un grand nombre de caractéristiques géologiques dont les volcans, les cratères d'impact, les canyons, les canaux, les failles, la formation des calottes polaires, etc. Ces photos ont mis en évidence les formations géologiques créées par le vent et ont rassemblé de nombreux témoignages de la présence d'eau à l'état liquide en surface. La mission Viking a également permis de fournir les premières photographies détaillées des deux satellites orbitant autour de la planète, Phobos et Déimos[60].
Etude in situ de la surface et du climat martien
[modifier | modifier le code]Les caméras de Viking 1 ont transmis 3043 photos et celles de Viking 2 3542 photos. Les caméras des atterrisseurs ont pris des photos de la surface de Mars autour de l'engin (4500 photos), du ciel, de la pelle utilisée pour prélever des échantillons du sol ainsi que de certaines parties de l'engin, du Soleil ainsi que de Phobos et Deimos pour répondre à des besoins opérationnels et géologiques et météorologiques. Elles ont permis d'établir pour la première fois que la couleur du ciel de Mars et de sa surface se situaient dans une gamme de couleurs comprise entre l'orange et le brun. La couleur du ciel est due à la garande quantité de poussière en suspension dans l'atmosphère[60],[32].
Échec de l'étude de la sismicité martienne
[modifier | modifier le code]Le sismomètre embarqué à bord de Viking 1 reste inopérant car les opérateurs ne parviennent pas à débloquer le verrou qui protège sa partie mobile des vibrations durant le vol[61] : ce sismomètre sera le seul instrument non opérationnel de tout le programme Viking. Le sismomètre de Viking 2 peut être activé mais les scientifiques constatent rapidement que les données collectées n'ont rien à voir avec des mouvements sismiques. Solidaire du pont de l'atterrisseur, l'instrument enregistre tous les mouvements mécaniques affectant celui-ci : rotation de l'antenne grand gain orientable, déplacement du bras robotique, fonctionnement du magnétophone et surtout action du vent qui fait vibrer la plateforme[62]. Seules les mesures faites de nuit, caractérisée par une diminution du vent et l'absence d'activité des instruments, sont éventuellement exploitables. Mais la faible sensibilité de l'instrument conjuguée avec les doutes sur l'origine des mouvements enregistrés ne permettent pas d'en tirer des données réellement utilisables[37].
-
 Preuve de présence de glace sur Utopia Planitia; photo prise par le module de surface de Viking 2.
Preuve de présence de glace sur Utopia Planitia; photo prise par le module de surface de Viking 2. -
 Photo prise par Viking Lander 1 le . Le rocher situé à gauche mesure 2 mètres de large.
Photo prise par Viking Lander 1 le . Le rocher situé à gauche mesure 2 mètres de large. -
 Lever de soleil martien sur Chryse Planitia par Viking 1.
Lever de soleil martien sur Chryse Planitia par Viking 1. -
 Photo prise par Viking 2 et dont le traitement des couleurs serait le plus réaliste.
Photo prise par Viking 2 et dont le traitement des couleurs serait le plus réaliste.




Les suites du programme Viking
[modifier | modifier le code]Un succès total sur le plan technique et scientifique
[modifier | modifier le code]Le programme Viking est un succès total à la fois sur le plan technique et scientifique.
D'un point de vue technique les deux orbiteurs et les deux atterrisseurs ainsi que leurs instruments ont fonctionné de manière nominale. Malgré la complexité d'un atterrissage en douceur à la surface de la planète Mars jamais tenté jusque là, les deux atterrisseurs Viking se sont posés sans aucun dommage validant une série de technologies (bouclier thermique, parachute, rétrofusées, contrôle d'attitude, etc.) qui seront réutilisées par les missions martiennes de la NASA au cours des décennies suivantes. La durée de fonctionnement des orbiteurs a largement dépassé ce qui était prévu : l'orbiteur Viking 1 a fonctionné durant six ans et celui de la mission Viking 2 durant quatre ans.
Sur le plan scientifique les missions martiennes qui avaient précédé n'avaient donné qu'un aperçu très partiel des caractéristiques et de l'histoire de la planète. Les missions Viking ont fourni pour la première fois Durant tout ce temps, la quantité de données transmises est colossale. Les atterrisseurs analysent en effet la composition de l’atmosphère et du sol martiens et collectent des données météorologiques sur plus de trois années martiennes (six années terrestres). Les orbiteurs, quant à eux, photographient la quasi-totalité de la planète avec une résolution inférieure à 300 mètres par pixel et notent les importantes variations de pression atmosphérique liées au cycle du dioxyde de carbone. Au sol comme depuis les orbites, l'observation détaillée met en évidence la présence passée d'eau liquide à sa surface, relançant ainsi la question de la vie sur la « planète rouge ». Enfin, face aux échecs successifs des Soviétiques, les missions Viking démontrent la supériorité des Américains dans le domaine technologique.
Un programme qui soulève de nouvelles questions scientifiques
[modifier | modifier le code]Les observations effectuées par les deux orbiteurs et les deux atterrisseurs du programme Viking ont démontré que l'histoire géologique et climatique de Mars est complexe, et que l'environnement martien continue de se modifier. Mais ces observations ont finalement soulevé autant de questions qu'elles ont apporté de réponses. L'origine et l'histoire des formations de surface découvertes depuis l'orbite et attribuées sans certitude à l'action d'anciens cours d'eau ou de lacs sont une énigme de même que la dichotomie manifeste entre hémisphère sud et nord est une énigme. Parmi les autres interrogations figurent[63] :
- la distribution des minéraux à sa surface ;
- l'existence de traces de la présence d'eau qui reste à confirmer ;
- la nature des matériaux dont sont composées les calottes polaires et l'évolution de celles-ci ;
- les caractéristiques de la circulation atmosphérique de Mars.
Dès le début des années 1980, il devient clair pour les planétologues que, pour répondre à ces questions, la prochaine mission d'exploration de Mars devait être un orbiteur circulant sur une orbite héliosynchrone durant une année martienne complète et disposant d'une suite d'instruments permettant de recueillir des données à la fois sur l'atmosphère, la surface et la structure interne.
Présence d'organismes vivants sur Mars
[modifier | modifier le code]Il existe aujourd'hui un consensus général pour affirmer que les sondes Viking démontrèrent finalement l'absence de micro-organismes dans le sol des deux sites d'atterrissage. Pourtant, les résultats des tests menés et leurs limites expérimentales font encore l'objet de discussions. La validité du principal résultat positif repose intégralement sur l'absence d'agents oxydants dans le sol de Mars. Or, il a été découvert récemment par le vaisseau Phoenix qu'il existait des perchlorates de sels dans ce même sol[64],[65]. La question de la vie microbienne sur Mars reste donc encore à ce jour sans réponse.
Un hiatus de vingt ans dans l'exploration de Mars (1975-1996)
[modifier | modifier le code]Le succès des missions Viking est suivi d'une période de plus de vingt ans sans nouvelle mission américaine à destination de Mars. La NASA et les scientifiques ayant participé au programme Viking avaient largement communiqué sur la possible détection de la vie sur Mars. Malgré l'indéniable succès technique et scientifique des deux missions, le public comme les responsables politiques retiennent principalement l'absence de résultat positif. Mars est de nouveau considérée comme un monde stérile et ennuyeux. Alors que les scientifiques et les ingénieurs du JPL avaient préparé la suite du programme Viking (mission équipée d'une foreuse pour prélever des échantillons en profondeur, astromobile, mission de retour d'échantillons), les administrateurs de la NASA beaucoup moins enthousiastes ne donnent suite à aucun de ces projets. Faute de moyens le nombre de scientifiques impliqués dans l'étude de Mars diminue progressivement. La recherche se concentre désormais sur l'histoire de Mars en particulier le processus qui semble avoir transformé un monde humide et relativement chaud en un monde froid et sec[53].
Alors que les Américains ont démontré leur suprématie sur la Lune et sur Mars et que les Soviétiques, à travers le programme Saliout, multiplient les vols de longue durée autour de la Terre, un nouveau type de rivalité se joue entre les deux nations, axé sur la maîtrise de l'espace circumterrestre. Le développement de la navette spatiale draine alors l'essentiel des ressources de la NASA. L'envoi d'hommes autour de la terre, sans être jugé aussi passionnant que l'exploration de contrées lointaines, suscite (auprès du grand public et des décideurs politiques) plus d'intérêt que les paysages désertiques extraterrestres. Certes, des équipes de scientifiques et d'ingénieurs américaines, russes et européennes élaborent différents projets, parfois très détaillés. Mais, durant deux décennies, aucun d'entre eux ne se concrétise hormis l'envoi de deux sondes soviétiques en 1988, qui ne parviendront pas à destination[53].
La reprise des missions martiennes : la mission Mars Observer
[modifier | modifier le code]Il faut attendre dix-sept ans pour que soit lancée une mission martienne chargée de répondre aux questions soulevées par le programme Viking : Mars Observer est conçu initialement comme une mission à bas coût grâce au recours à une plateforme de satellite commercial et à une conception modulaire permettant une intégration simple des instruments scientifiques. Mais peu après le démarrage des développements qui intervient en 1984, les coûts s'envolent : le budget initial de 250 millions de dollars atteint finalement 850 millions de dollars (959 millions de dollars selon une autre source) en incluant le lanceur. Ce dérapage du budget est notamment dû aux modifications apportées par le JPL, gestionnaire du projet, qui a renoncé progressivement au concept de départ reposant sur la simplicité et le recours à des composants disponibles[66],[note 10],[67]. Mars Observer est lancée le mais trois jours avant l’insertion sur son orbite martienne, le , le contact avec la sonde spatiale est définitivement perdu, sans doute à la suite d'une fuite des ergols ayant entraîné une perte du contrôle d'attitude[68].
Mars Observer était la sonde spatiale la plus coûteuse lancée jusque-là par la NASA. L'échec de cette mission entraîne une révision complète de la stratégie américaine d’exploration du Système solaire. L'agence décide de lancer désormais des sondes spatiales moins sophistiquées mais à budget réduit : l'objectif est de ne pas tout perdre en cas d’échec tout en permettant la réalisation d'un plus grand nombre de missions avec un cycle de développement raccourci. C’est le « better, faster, cheaper » (« mieux, plus vite, moins cher ») qui devient la devise du nouveau programme Discovery. Un programme d'exploration martien ambitieux est mis en place en appliquant ce nouveau dogme : à chaque conjonction favorable de Mars et de la Terre (environ tous les deux ans), la NASA prévoit d’envoyer à la fois une sonde spatiale de type orbiteur, qui doit effectuer ses observations depuis une orbite martienne, et une autre de type atterrisseur, chargée de se poser sur le sol martien pour y recueillir des données scientifiques. Les objectifs assignés initialement à la sonde Mars Observer perdue en vol, sont répartis entre les orbiteurs beaucoup plus légers du nouveau programme : des copies des instruments scientifiques développés pour Mars Observer seront donc embarqués sur ces nouvelles sondes[69].
| Mission | Date de lancement | Type | Agence spatiale | Résultat |
|---|---|---|---|---|
| Programme Viking | 1975 | 2 orbiteurs et 2 atterrisseurs | Succès Dernière mission scientifique réussie avant MGS | |
| Programme Phobos | 1988 | 2 orbiteurs et 2 atterrisseurs lunaires | Échec(1) | |
| Mars Observer | 1992 | Orbiteur | Échec | |
| Mars Global Surveyor | 1996 | Orbiteur | Succès | |
| Mars 96 | 1996 | 1 orbiteur et 2 atterrisseurs | Échec | |
| Mars Pathfinder | 1996 | Atterrisseur(2) | Succès | |
| Nozomi | 1998 | Orbiteur | Échec | |
| Mars Climate Orbiter | 1999 | Orbiteur | Échec | |
| Mars Polar Lander | 1999 | Atterrisseur | Échec | |
| (1)Phobos 2 a réussi à s'insérer en orbite mais est tombé en panne avant d'avoir rempli ses objectifs principaux (2)Mission essentiellement technologique et non scientifique | ||||
Notes et références
[modifier | modifier le code]Notes
[modifier | modifier le code]- ↑ Un champ magnétique planétaire protège l'atmosphère et la surface du vent solaire.
- ↑ le montant final du contrat de Martin Marietta fut fixé à 299,1 millions de dollars et approuvé par Paine le 20 octobre. Les coûts supportés à ce stade par Martin Marietta furent évalués à 14,53 millions de dollars, mais le budget complémentaire alloué permettait à l'entreprise de gagner plus d'argent si le coût de développement final était d'un montant inférieur aux 299,1 millions prévus. Des pénalités étaient également prévues en cas de dépassement : chaque dollar de coût non prévu devait entraîner 15 cents de pénalité (15 %), et inversement, chaque dollar économisé rapportait à l'entreprise un bonus de 15 cents
- ↑ L'astronome et vulgarisateur Carl Sagan, qui a des vues plutôt extrêmes sur le sujet, demandera en vain à la NASA d'équiper les atterrisseurs Viking avec des projecteurs permettant de photographier des créatures de grande taille qui se déplaceraient durant la nuit près des sites d'atterrissage
- ↑ La navette spatiale américaine est optimisée pour les lancements en orbite basse. Elle n'est pas conçue pour lancer des missions interplanétaires
- ↑ La documentation ne précise pas la taille de ces mots, mais on sait que les imageurs produisaient des données sur 7 bits. Par ailleurs, le système de calcul embarqué Cosmac était de type 8 bits. On peut donc envisager qu'il s'agit de mots de 1 octet (soit 7 bits de données et 1 bit pour la vérification mémoire)
- ↑ Dans certains cas l'échantillon peut être porté à une température de 500°C
- ↑ Les gaz mettent 84 minutes pour parcourir l'ensemble de la colonne.
- ↑ La solution nutritive contient des sucres, 19 acides aminés, de nombreux facteurs de croissance dont des vitamines et des sels inorganique
- ↑ Viking A devait être lancée avant Viking B mais différents problèmes techniques reportent le lancement du 11 aout au 9 septembre et c'est finalement Viking B qui est lancée en premier. Pour ne pas reporter le tir de deux ans (prochaine ouverture de la fenêtre de lancement vers Mars), les responsables de la mission décident de faire décoller la fusée malgré les conditions météo
- ↑ Le coût de réalisation de la caméra MOC, évalué à 5-6 millions, atteint finalement 23,7 millions de dollars. 40 % du surcoût est attribué à des modifications apportées au cahier des charges ou dans les procédures à l'initiative du centre JPL ou de la NASA, 25 % aux problèmes rencontrés en cours de développement, 20 % au manque d'expérience ou aux incompréhensions et 15 % à une augmentation des performances
Références
[modifier | modifier le code]- ↑ F. Rocard op. cit. p. 32-35
- ↑ Taylor op. cit. p. 28-30.
- Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, p. 65-70
- Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, p. 216-219
- ↑ NASA, "Viking Contract Award" news release 69-82, 29 mai 1969
- ↑ David B. Ahearn, interview téléphonique par Eze11. Le 22 novembre 1978 et audit NASA "Report on Audit of Viking Program Project Initiation to Contractor Selection. Langley Research Center, Hampton, Virginia," rpt. LR-DU: 33-70, 18 décembre 1969, p. 17
- ↑ Money problem at Nasa Livre historique de la Nasa sur le programme Viking
- ↑ Table des coûts dans: On Mars: Exploration of the Red Planet. 1958-1978, SP-4212, site historique Nasa
- ↑ Philippe Labrot, « Les sondes soviétiques de 1971 », sur Nirgal.net (consulté le )
- Philippe Labrot, « 1971, l'année martienne - Les sondes martiennes », sur Nirgal.net (consulté le )
- ↑ (en) R. Braun et R. Manning, Mars Exploration Entry, Descent and Landing Challenges, (lire en ligne)
- Philippe Labrot, « La quête des Viking », sur Nirgal.net (consulté le )
- NASA, « Viking 1 Orbiter », NASA Space Science Data Coordinated Archive (consulté le )
- ↑ Description de la mission Viking, page 3
- ↑ James Tomayko, « Computers in Spaceflight: The NASA Experience », NASA, (consulté le )
- ↑ Neil A. Holmberg, Robert P. Faust, H. Milton Holt, « NASA Reference Publication 1027: Viking '75 spacecraft design and test summary. Volume 1 - Lander design », NASA, (consulté le )
- ↑ Neil A. Holmberg, Robert P. Faust, H. Milton Holt, « NASA Reference Publication 1027: Viking '75 spacecraft design and test summary. Volume 2 - Orbiter design », NASA, (consulté le )
- ↑ Description de l'atterrisseur Viking 1 sur le site de la Nasa
- ↑ Spacecraft sterilization standards and contamination of Mars, Journal of Astronautics and Aeronautics, Carl Sagan et S Coleman, 1965, p22-27
- ↑ « voir le site de la Nasa sur la protection des planètes »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) (consulté le )
- ↑ Description du système informatique page 5 du document du JPL sur le site de la Nasa
- ↑ (en) Informations sur les RCA Cosmac embarqués dans des sondes spatiales
- ↑ description du JPL sur le site JPL de la Nasa, page 6
- ↑ description de l'équipement scientifique de l'orbiteur
- ↑ (en) « Viking 2 Orbiter - Orbiter Imaging », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ The Viking Orbiter imaging system sur La documentation historique de la Nasa sur l'imageur
- ↑ (en) « Viking 2 Orbiter - Mars Atmospheric Water Detector (MAWD) », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Orbiter - Infrared Thermal Mapper (IRTM) », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Orbiter - Orbiter Radio Science », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Gas Chromatograph/Mass Spectrometer », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Biology (GEX/LR/PR) », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- (en) « Viking 2 Lander - Lander Imaging », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - X-Ray Fluorescence Spectrometer (XRFS) », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Magnetic Properties », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Physical Properties », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Meteorology », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- P. Labrot, « Viking fut la première (et la seule) mission à déposer un sismomètre sur Mars », Institut de physique du globe de Paris (consulté le )
- ↑ (en) « Viking 2 Lander - Seismology », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Lander Radio Science », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Atmospheric Structure », sur NASA Space Science Data Coordinated Archive, NASA (consulté le )
- ↑ (en) « Viking 2 Lander - Retarding Potential Analyzer (RPA) », sur NASA Space Science Data Coordinated Archive, NASA (consulté le ).
- ↑ (en) « Viking 2 Lander - Upper Atmosphere Mass Spectrometer (UAMS) », sur NASA Space Science Data Coordinated Archive, NASA (consulté le ).
- ↑ (en) D.J. Mudgway, « Viking Mission Support », JPL Technical Report, Jet Propulsion Laboratory, vol. VIII, , p. 4 (lire en ligne, consulté le )
- ↑ La description du SFOF sur le site des monuments historiques de la Nasa
- ↑ On Mars: Exploration of the Red Planet. 1958-1978, chapitre 8, VIKING LANDER: BUILDING A COMPLEX SPACECRAFT
- Philippe Labrot, « De Voyager à Viking », sur Nirgal.net (consulté le )
- ↑ NASA, « Viking 1 Lander », sur NASA Space Science Data Coordinated Archive, Centre de vol spatial Goddard (consulté le )
- ↑ Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, p. 235
- NASA, « Viking 2 Orbiter », sur NASA Space Science Data Coordinated Archive, Centre de vol spatial Goddard (consulté le )
- ↑ NASA, « Viking 2 Lander », sur NASA Space Science Data Coordinated Archive, Centre de vol spatial Goddard (consulté le )
- ↑ Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, p. 238-256
- ↑ Thirty Years After: The Science of the Viking Program and the Discovery of a 'New Mars, p. 6-7
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9), p. 43-50
- ↑ Le Monde du 5 aout 1976.
- Le Monde du 13 aout 1976.
- ↑ Le Monde du 10 aout 1976.
- ↑ Le Monde du 13 aout et du 17 aout 1976.
- ↑ Journal Astrobiology, août 2007, LUTHER W.A Concept for NASA's Mars 2016 Astrobiology Field Laboratory
- ↑ Thirty Years After: The Science of the Viking Program and the Discovery of a 'New Mars, p. 4
- Thirty Years After: The Science of the Viking Program and the Discovery of a 'New Mars, p. 2-3
- ↑ Maurice Arvonny, « Le site Utopia de la planète Mars a été photographié par Viking-2 », Le Monde, (lire en ligne, consulté le ).
- ↑ Le Monde du 20 octobre 1976.
- ↑ (en) Arden L. Albee, Raymond E. Arvidson, Frank Palluconi et Thomas Thorpe, « Overview of the Mars Global Surveyor mission », Journal of Geophysical Research, vol. 106, no E10, , p. 23291–23316 (lire en ligne [PDF])
- ↑ Perchlorate found in Martian soil, daté du 6 août 2008
- ↑ Martian Life Or Not? NASA's Phoenix Team Analyzes Results, daté du 6 août 2008,
- ↑ Ulivi et Harland 2009, p. 327-328.
- ↑ (en) M. C. Malin, K. S. Edgett et al., « An overview of the 1985–2006 Mars Orbiter Camera science investigation », Mars, , p. 1-60 (lire en ligne)
- ↑ (en) Paolo Ulivi et David M. Harland, Robotic Exploration of the Solar System : Part 2 Hiatus and Renewal 1983-1996, Chichester, Springer Praxis, , 535 p. (ISBN 978-0-387-78904-0), p. 333
- ↑ (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9), p. 84-91
Bibliographie
[modifier | modifier le code]- Dossiers de presse de la NASA
- (en) NASA, Viking, , 36 p. (lire en ligne)Dossier de presse fourni par la NASA pour le lancement des sondes Viking
- (en) NASA, Viking Encounter Press Kit, , 124 p. (lire en ligne)Dossier de presse fourni par la NASA : objectifs, expériences scientifiques, opérations en surface, caractéristiques techniques de l'orbiteur et de l'atterrisseur.
- (en) NASA, Viking Press Handbook, NASA, , 89 p. (lire en ligne)Dossier de presse fourni par la NASA sur le déroulement de la descente vers le sol et les opérations en surface.
- Historique
- (en) Edward Clinton Ezell et Linda Neuman Ezell, On Mars : Exploration of the Red Planet. 1958-1978 (NASA SP-4212), NASA History Office, (lire en ligne [PDF])Histoire du programme d'exploration de Mars de 1958 à 1978.
- Spécifications techniques
- (en) Neil A. Holmberg, Robert P. Faust et H. Milton Holt, Viking '75 Spacecraft Design and Test Summary - Volume I - Lander Design, NASA, , 216 p. (lire en ligne [PDF])Caractéristiques techniques de l'atterrisseur.
- (en) Neil A. Holmberg, Robert P. Faust et H. Milton Holt, Viking '75 Spacecraft Design and Test Summary - Volume II - Orbiter Design, NASA, , 322 p. (lire en ligne [PDF])Caractéristiques techniques de l'orbiteur.
- (en) W. J. O'Neiln, R. P. Rudd, D. L. Farless, C. E. Hildebrand, R. T. Mitchell, K. H. Rourke et al., Viking Navigation, Jet Propulsion Laboratory, , 322 p. (lire en ligne [PDF])Conception et déroulement de la navigation du lancement jusqu'à l'arrivée sur le sol martien.
- Découvertes scientifiques du programme Viking
- (en) NASA, Mars : the Viking discoveries, , 39 p. (lire en ligne)Les découvertes scientifiques des missions Viking.
- (en) Joel S. Levine, Thirty Years After: The Science of the Viking Program and the Discovery of a New Mars, NASA, , 8 p. (lire en ligne)Les découvertes scientifiques des missions Viking 30 ans plus tard.
- (en) M.H. Carr, W.A. Baum, K.R. Blasius, G.A. Briggs, J.A. Cutts et al., Viking orbiter views of Mars, NASA, (lire en ligne)Résultats scientifiques obtenus à partir des photos réalisées par les orbiteurs Viking.
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4) L'exploration scientifique de Mars et découvertes scientifiques du début de l'ère spatiale jusqu'en 2007.
- (en) Hugh H. Kieffer, Bruce M. Jakosky, Conway W. Snyder et Mildred Shapley Matthews, Mars, University of Arizona Press, , 1500 p. (ISBN 978-0-8165-3860-7)Synthèse des connaissances scientifiques sur Mars à la suite des missions Viking (multiples auteurs avec une participation majeure des scientifiques impliqués dans les missions Viking).
- (en) William Sheehan, The Planet Mars: A History of Observation and Discovery, University of Arizona Press, , 270 p. (ISBN 9780816516414, lire en ligne)Histoire de l'observation de Mars à l'aide de télescopes puis au moyen de sondes spatiales (jusqu'en 1996) et des théories scientifiques.
- Génèse et déroulement des missions Viking
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 1 The Golden Age 1957-1982, Chichester, Springer Praxis, , 534 p. (ISBN 978-0-387-49326-8) Génèse, caractéristiques techniques et déroulement des missions Viking (pages 216-256).
- (en) Paolo Ulivi et David M. Harland, Robotic Exploration of the Solar System : Part 2 Hiatus and Renewal 1983-1996, Chichester, Springer Praxis, , 535 p. (ISBN 978-0-387-78904-0), p. 333Génèse, caractéristiques techniques et déroulement des missions martiennes postérieures aux missions Viking jusqu'à 1996.
- (en) NASA, NASA Facts - Viking Mission to Mars, Springer Praxis, , 8 p. (lire en ligne)Synthèse des caractéristiques et des résultats de la mission.
- Ouvrages de vulgarisation
- Francis Rocard, Planète rouge : dernières nouvelles de Mars, Paris, Dunod, coll. « Quai des Sciences », 2003-2006, 2e éd., 257 p. (ISBN 978-2-10-049940-3 et 2-10-049940-8)
Voir aussi
[modifier | modifier le code]Articles connexes
[modifier | modifier le code]- Eau sur Mars
- Exobiologie, Vie sur Mars
- Exploration de la planète Mars
- Mars (planète)
- Programme Mariner Prédécesseur du programme Viking
- Programme Voyager Mars Programme abandonné remplacé par le programme Viking
- Sonde spatiale
- Titan IIIA Lanceur spatial des sondes Viking
- Viking 1 Une des deux missions du programme Viking
- Viking 2 Une des deux missions du programme Viking
Liens externes
[modifier | modifier le code]- (fr) Site nirgal.net
- (en) Viking sur le site des archives (Goddard) de la NASA
- (en) Page de la mission viking sur le site de la Nasa
- (en) Images de la mission Viking sur le site JPL Photojournal

