
 French
French Deutsch
DeutschNavcam — Википедия
Navigational camera (Navcam) (в переводе с англ. — «навигационная камера») — тип камер, устанавливаемых на планетоходах или космических аппаратах, используемых для навигации и не мешающих научным инструментам[1]. Навигационные камеры обычно создают широкоугольные фотографии, которые используются для планирования следующих передвижений планетохода или для отслеживания объектов.
Марсоход «Кьюриосити», который совершил посадку на Марс в 2012 году, имеет две пары чёрно-белых навигационных камер, установленных на мачте для поддержки наземной навигации. Камеры имеют угол обзора 45° и используют видимый свет для создания стереоскопических трёхмерных изображений. Эти камеры, как и в миссии «Марс Пасфайндер», поддерживают использование формата сжатия ICER.
Марсоходы миссии Mars Exploration Rover имеют одну пару чёрно-белых навигационных камер, которые закреплены на титановой планке вместе с основными камерами (Pancam)[1][2]. Планка находится на вершине мачты (Pancam Mast Assembly) марсохода на высоте 1,5 метров[1]. Navcam состоит из двух частей: блока электроники и детекторной головки, которая включает в себя оптическую часть и ПЗС-матрицу[2]. Два блока соединяются эластичным шлейфом. В связи с тем, что блок электроники находится вне марсохода, то он содержит нагревающийся резистор, который обогревает электронику до минимальной рабочей температуры в -55 °C[2]. Navcam имеет светосилу f/12 и фокусное расстояние 14,67 мм[2]. В Navcam, как и в других камерах марсоходов MER, применяется ПЗС-матрица с разрешением 1024×2048 фирмы Mitel. Чип разделен на две части: одна часть размером 1024×1024 чувствительна к свету и непосредственно создаёт изображения, а вторая часть размером 1024×1024 принимает эти данные для хранения/считывания[2]. Чтобы не быть чувствительной к свету она закрыта черным алюминиевым экраном. Каждая Navcam имеет поле зрения 45°× 45°[1]. Угловое разрешение в центре поля зрения составляет 0,82 мрад/пиксель[2], что выше, чем у основных камер спускаемого аппарата «Марс Пасфайндер» (0,99 мрад/пиксель), но ниже, чем камер спускаемых аппаратов «Викинг», работающих в режиме высокого разрешения (0,7 мрад/пиксель). Размер одного пикселя ПЗС-матрицы составляет 12×12 микрон[2]. Лучшее для съёмок фокусное расстояние достигается на дистанции в 1 м[2]. Номинальное время экспозиции для полуденной съёмки на поверхности Марса (при прозрачности атмосферы 0,5) составляет 0,25 сек[2]. Одна Navcam весит 220 грамм и потребляет 2,15 Вт[2]. Navcam работает совместно с камерами Hazcam[1][2].
Космический аппарат «Розетта» Европейского космического агентства использовал одну навигационную камеру с 5° полем зрения и разрешением 12 бит 1024 × 1024 пикселей[3].
- Галерея
-
 Мачта марсохода «Кьюриосити», на которой можно наблюдать две пары Navcam (по краям)
Мачта марсохода «Кьюриосити», на которой можно наблюдать две пары Navcam (по краям) -
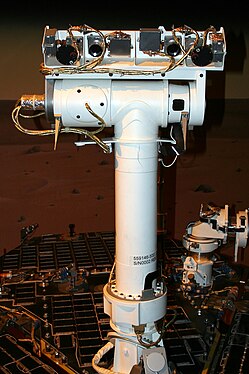 Мачта марсоходов миссии Mars Exploration Rover с двумя камерами Pancam (по краям) и двумя камерами Navcam
Мачта марсоходов миссии Mars Exploration Rover с двумя камерами Pancam (по краям) и двумя камерами Navcam -
 Пример снимка от Navcam марсохода «Оппортьюнити»
Пример снимка от Navcam марсохода «Оппортьюнити» -
 Первый снимок от Navcam марсохода «Кьюриосити» на Марсе
Первый снимок от Navcam марсохода «Кьюриосити» на Марсе




Примечания
[править | править код]
Исследование Марса космическими аппаратами | |
|---|---|
| Пролётные | |
| Орбитальные | |
| Посадочные | |
| Марсоходы | |
| Марсолёты | |
| Запланированные |
|
| Предложенные | |
| Потерянные | |
| Отменённые | |
| См. также | |
Полужирным выделены действующие космические аппараты | |